

Leg linkage mechanism of quadruped robot
A quadruped robot and linkage mechanism technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as being unable to lie down and stand up smoothly, achieve the effect of reducing the maximum range of motion and increasing the speed of leg movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
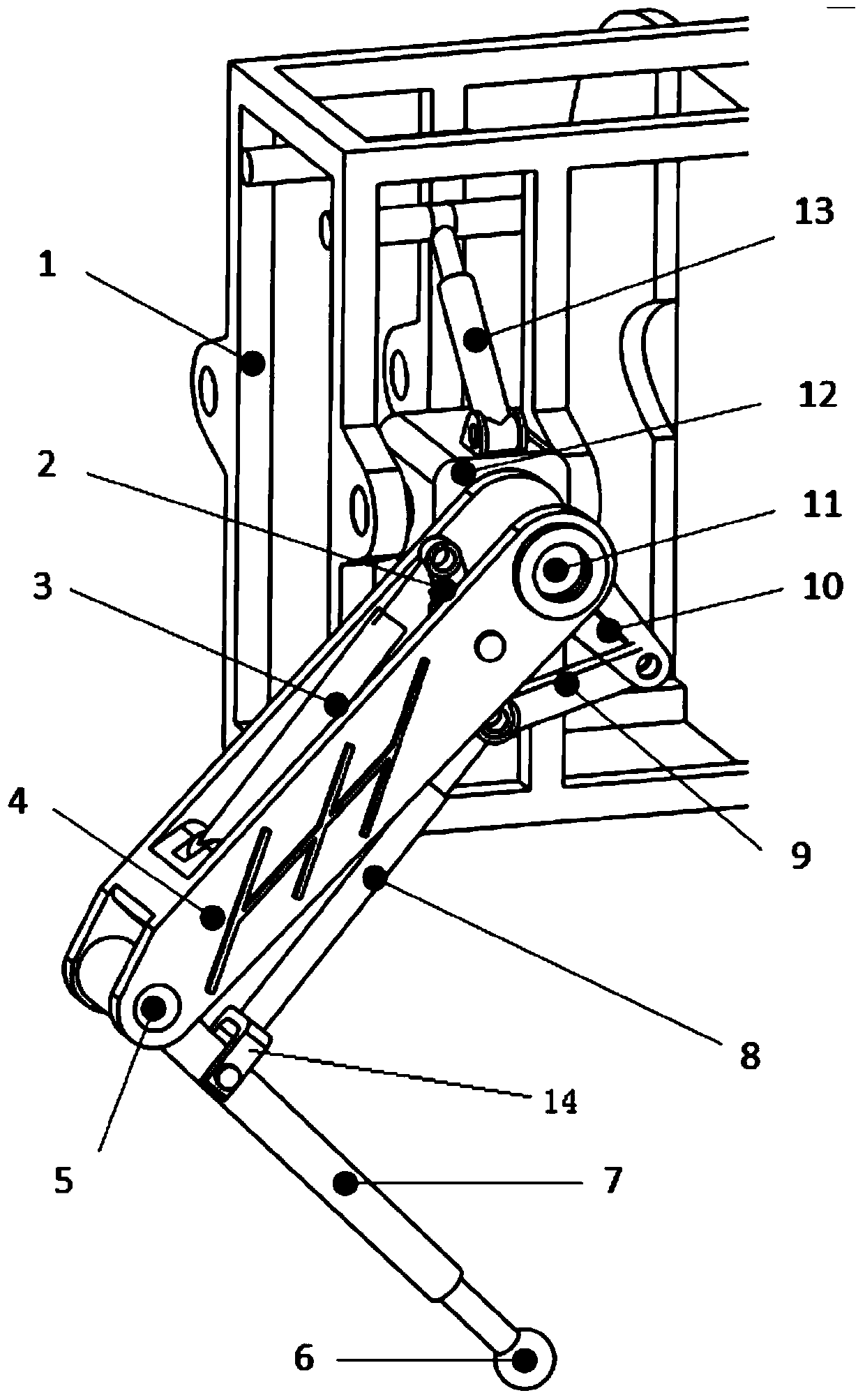
[0016] see attached figure 1 , the present invention provides a quadruped robot leg linkage mechanism, including a thigh assembly, a lower leg assembly and a hip driver, and the thigh assembly, lower leg assembly and hip driver are respectively connected by connecting rods to form a robot leg The internal linkage mechanism has the characteristics of strong bearing capacity, convenient driving, reasonable structure and simple gait algorithm. The connecting rod includes a thigh swing connecting rod 2, a calf swing connecting rod 8, and a hip swing connecting rod 9; The oil cylinder 3 is pinned, and its other end is pinned with the shank swing link 8 and the hip swing link 9 respectively, the other end of the shank swing link is connected with the shank assembly, and the other end of the hip swing link is connected with the hip External drive connection. Described shank assembly comprises foot 6, shank 7 and knee joint hinge 5, and described shank and foot constitute an integra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More