

Bionic foot-type robot comprehensive simulation strategy
A robot and co-simulation technology, applied in the fields of motor vehicles, transportation and packaging, etc., can solve problems such as lack of practical guiding significance, poor adaptability of motion control and debugging of bionic legged robots, and large data differences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
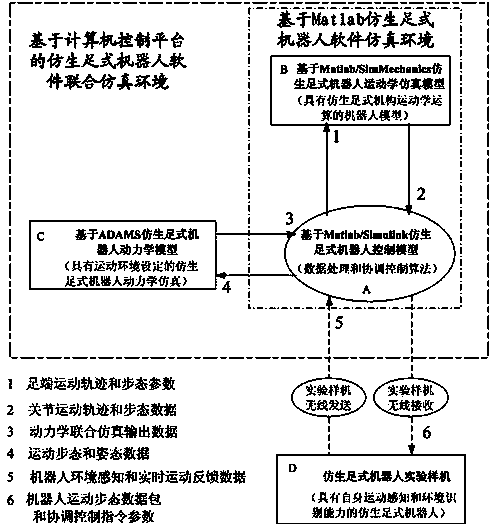
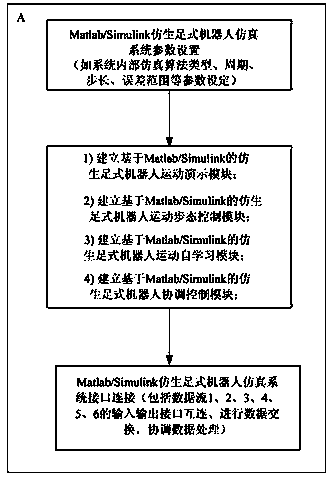
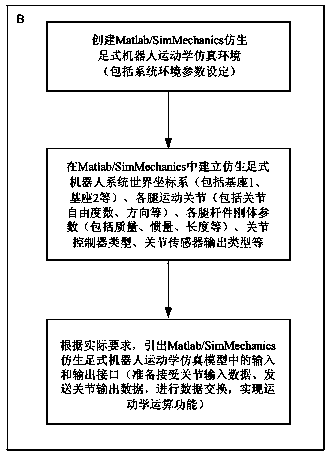
[0035] combine figure 1 , 2 , 3. The present embodiment is a block diagram of a comprehensive simulation strategy for a bionic footed robot based on Matlab, ADAMS and half-in-the-loop co-simulation, including: a bionic footed robot based on Matlab / Simulink control model A, a bionic footed robot based on Matlab / SimMechanics Kinematics simulation model B, ADAMS-based bionic footed robot dynamics model C, bionic footed robot experimental prototype D, foot end motion trajectory and gait parameters 1, joint motion trajectory and gait data 2; dynamics co-simulation output data 3. Motion gait and posture data 4. Robot environment perception and real-time motion feedback data 5. Robot motion gait data packets and coordination control instruction parameters 6.
[0036] Among them, the input and output data between the control model of the bionic footed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More