

Portable target tracking method and system based on four-axis air vehicle
A quadcopter and target tracking technology, which is applied in the field of portable target tracking methods and systems, can solve the problems affecting the accuracy and efficiency of target detection and tracking, the large amount of calculation of the detection and tracking algorithm, and the low running speed of the TLD algorithm. Accurate target automatic search and tracking, achieve automatic target search and tracking, reduce the effect of size and weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
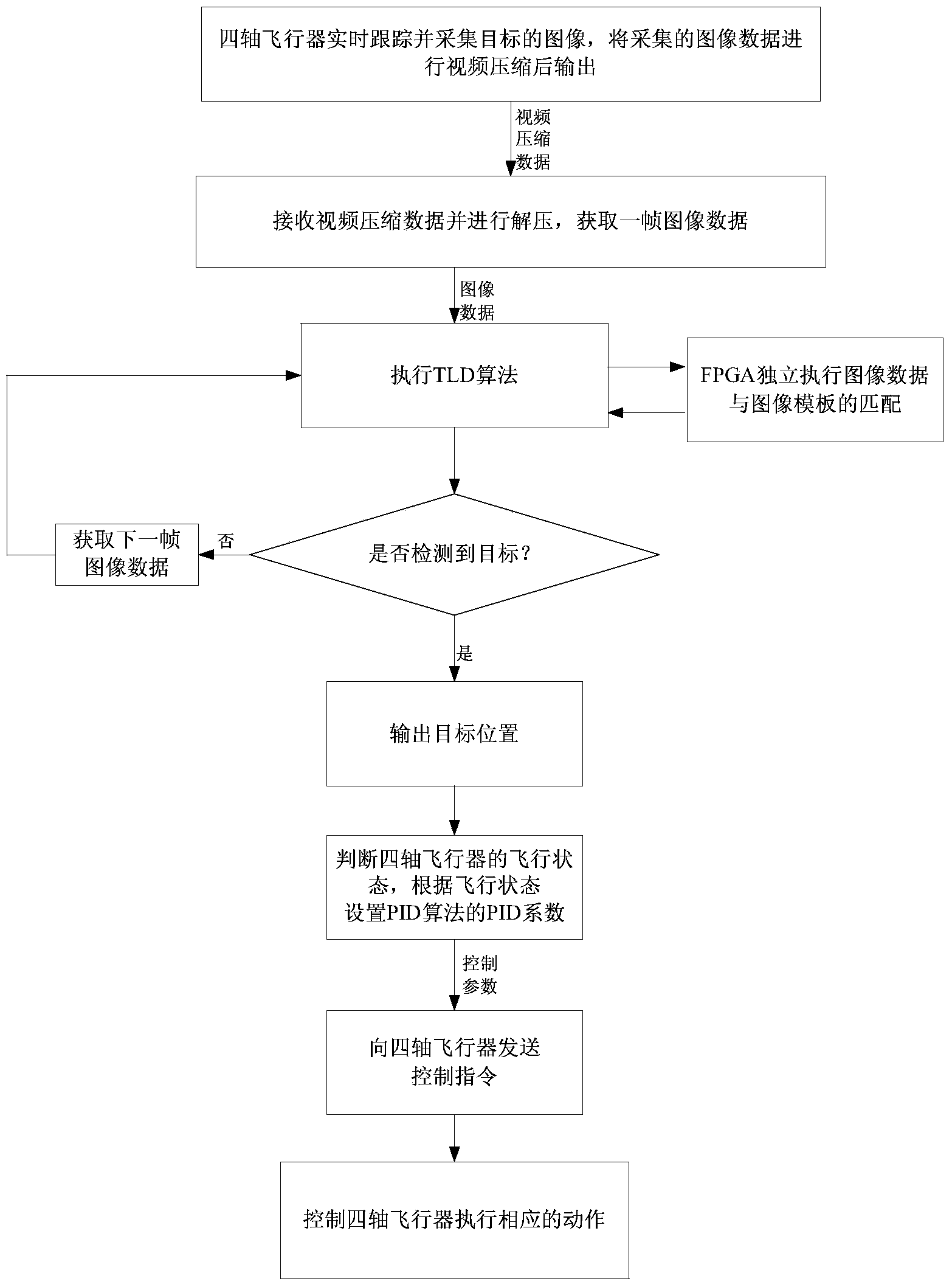
[0047] Such as figure 2 As shown, in the present embodiment, based on the portable target tracking method of quadrocopter, the steps are:
[0048] (1) The quadcopter 2 tracks and collects the image of the target 1 in real time, and outputs the collected image data after video compression;
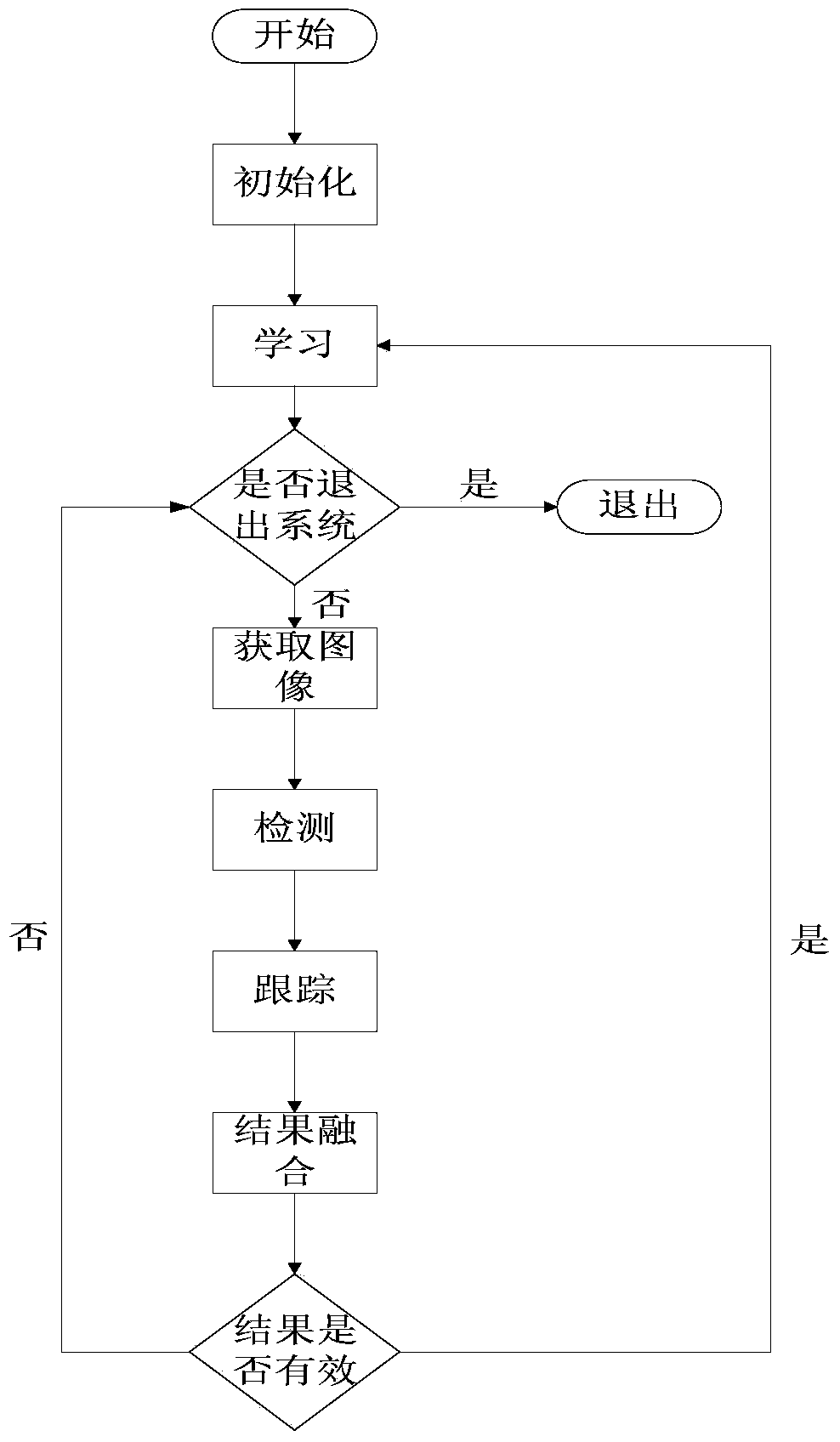
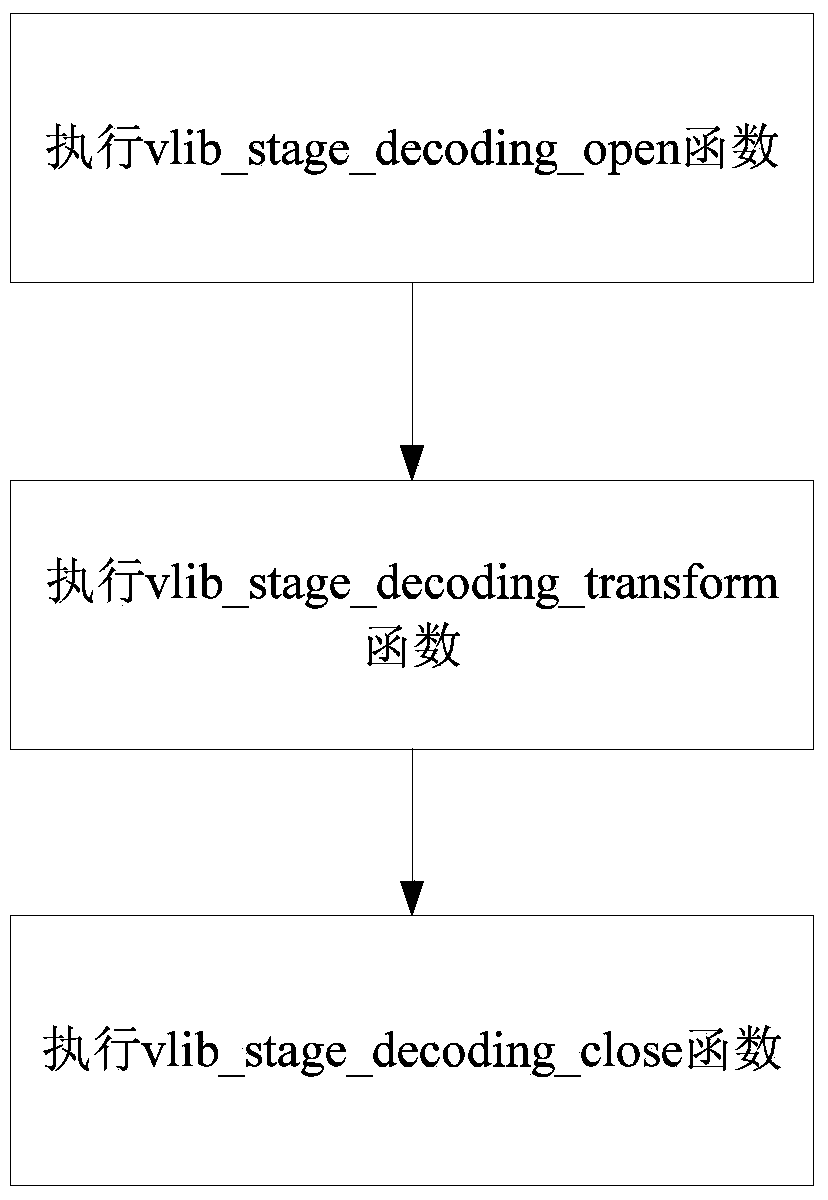
[0049] (2) Receive compressed video data and decompress it, use the TLD algorithm to detect and track target 1 according to the decompressed image data, and use FPGA to independently match the decompressed image data with the image template; when target 1 is detected, output The detected target position;
[0050] (3) Calculate the control parameters using the PID algorithm according to the detected target position, and set the PID coefficient in the PID algorithm according...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More