

Multi-rotor wing robot in liquid medium
A liquid medium, robot technology, applied in the direction of motor vehicles, underwater ships, underwater operation equipment, etc., can solve the problems of single posture and inflexibility, and achieve the effect of saving energy, improving safety, and reducing motion resistance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
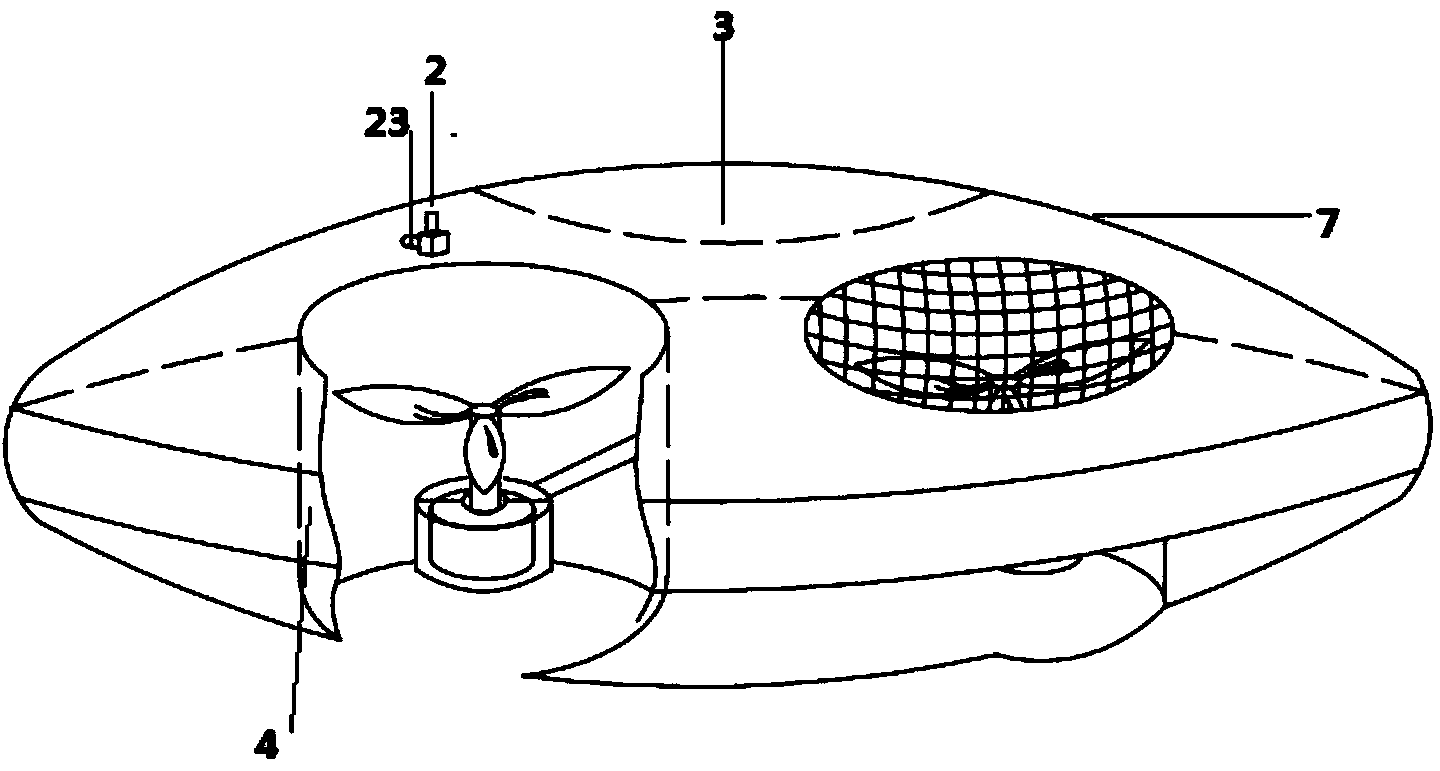
[0042] The specific structure when the rotor body of the multi-rotor robot under the liquid medium of the present invention is a quadrotor is as follows:
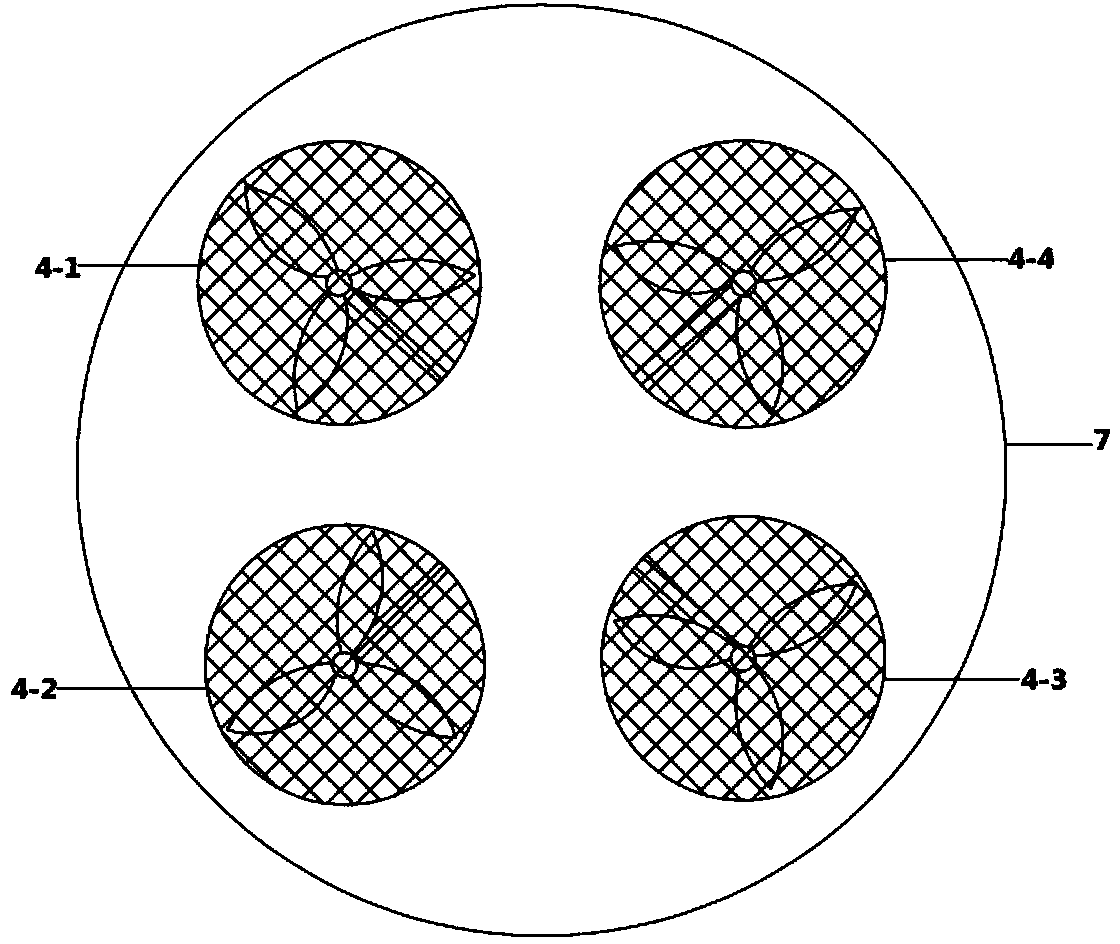
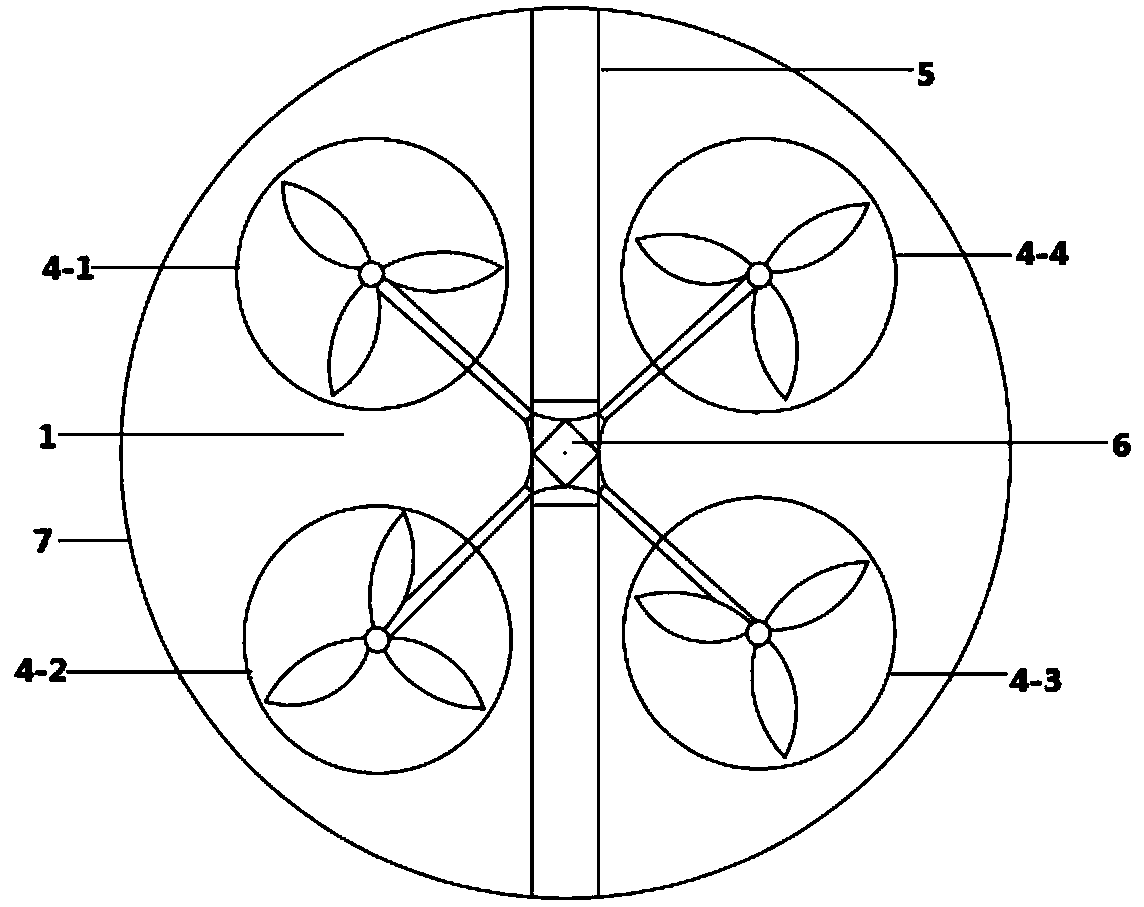
[0043] like figure 2 , image 3 and Figure 4 As shown, it includes a streamlined closed casing 7, a quadrotor body 1, and a control unit 6.
[0044] Four cylindrical sealing covers 4-1, 4-2, 4-3, 4-4 penetrate the closed shell 7 from top to bottom; the four rotors 9-1, 9-2, 9-3 of the quadrotor body 1 , 9-4 are respectively located in the through holes formed by the four sealing covers 4-1, 4-2, 4-3, 4-4, and the four rotors 9-1, 9-2, 9-3, 9- The rotating surfaces of 4 are in the same plane.
[0045] The quadrotor body 1 also includes four rotor motors 8-1, 8-2, 8-3, 8-4, four rotor motor drivers 10-1, 10-2, 10-3, 10-4, four supports Rod 11-1, 11-2, 11-3, 11-4; Four rotors 9-1, 9-2, 9-3, 9-4 are respectively installed on four rotor motors 8-1, 8-2, 8-3, 8-4 on; four rotor motors 8-1, 8-2, 8-3, 8-4 respectively with ...
Embodiment 2
[0052] The specific structure when the rotor body of the multi-rotor robot under the liquid medium of the present invention is a six-rotor is as follows:
[0053] like Figure 5 , Image 6 , Figure 7 and Figure 8 As shown, it includes a streamlined closed casing 7, a quadrotor body 1, and a control unit 6.
[0054] Six cylindrical sealing covers 6-1, 6-2, 6-3, 6-4, 6-5, 6-6 penetrate the closed shell 7 from top to bottom; the six rotors 9-1 of the six rotor body 1 . In the through-hole formed, and the rotating surfaces of six rotors 9-1, 9-2, 9-3, 9-4, 9-5, 9-6 are in the same plane.
[0055] The six-rotor body 1 also includes six rotor motors 8-1, 8-2, 8-3, 8-4, 8-5, 8-6, and six rotor motor drivers 10-1, 10-2, 10-3 , 10-4, 10-4, 10-5, 10-6, six support rods 11-1, 11-2, 11-3, 11-4, 11-5, 11-6; six rotors 9- 1, 9-2, 9-3, 9-4, 9-5, 9-6 are installed on six rotor motors 8-1, 8-2, 8-3, 8-4, 8-5, 8- 6 on; six rotor motors 8-1, 8-2, 8-3, 8-4, 8-5, 8-6 are respectively con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More