

Frog imitating swimming robot based on driving of joint type aerodynamic soft body actuator
A robot and actuator technology, applied in the field of robotics, can solve the problems of difficulty in achieving lightweight and miniaturization of machines, large resistance in the propulsion process, and reduced mobility of robots, so as to enhance environmental adaptability, ensure limb bearing capacity, light weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
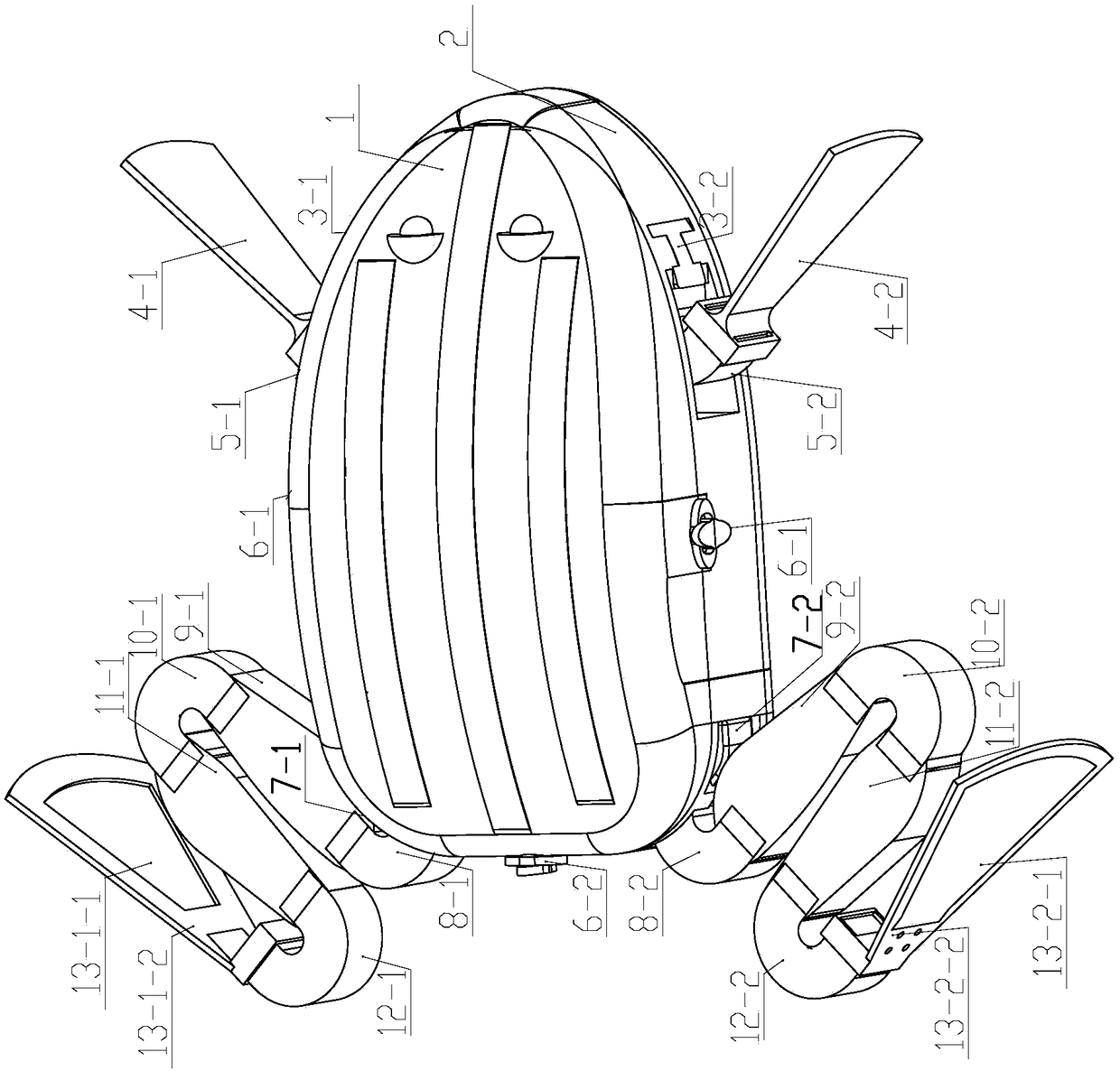
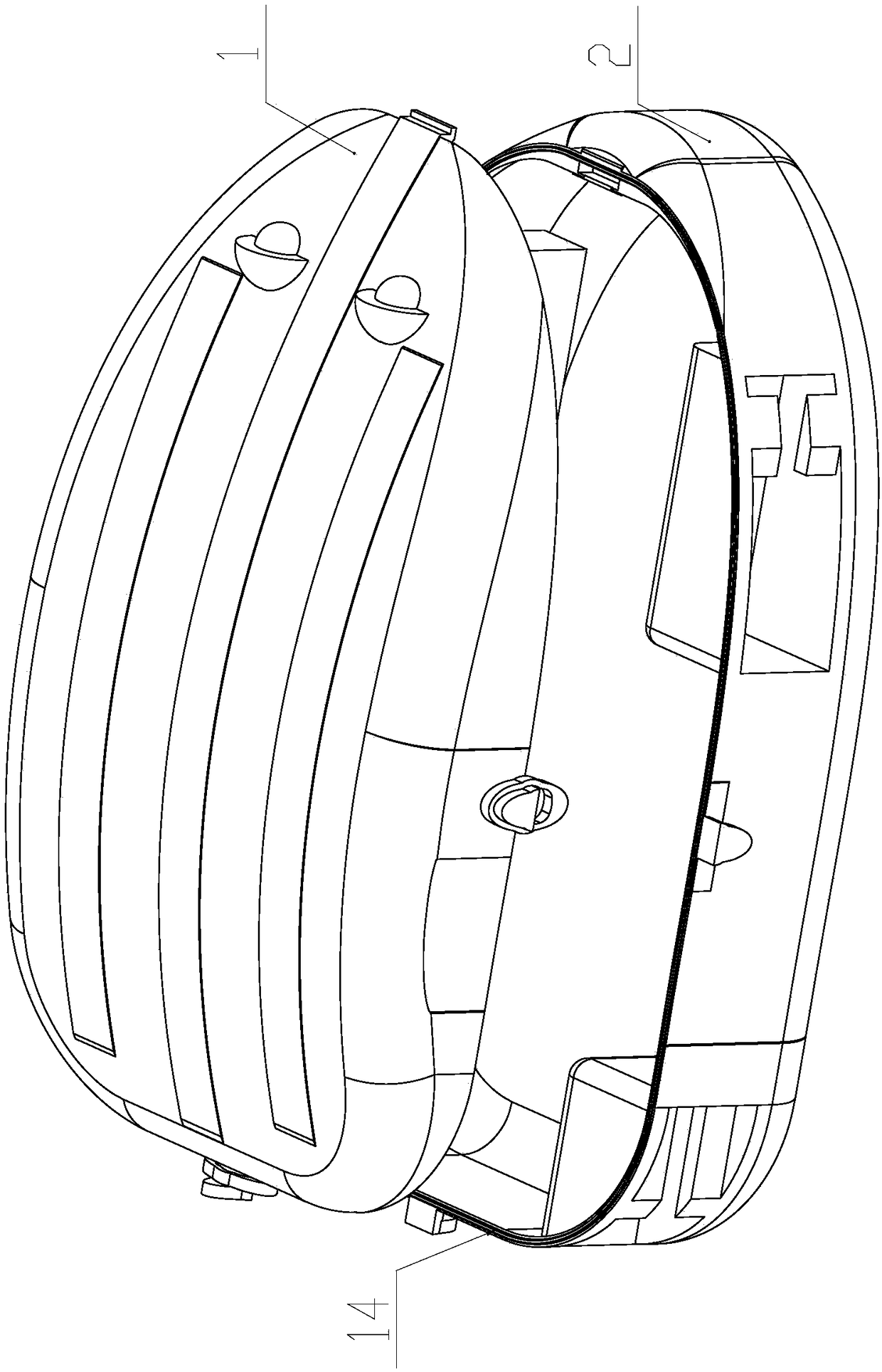
[0021] Specific implementation mode one: combine Figure 1-Figure 8 Describe the present embodiment. The frog-like swimming robot driven by the articulated pneumatic soft actuator described in the present embodiment includes the main torso of the robot, the left forelimb of the robot, the right forelimb of the robot, the left hind limb of the robot, the right hind limb of the robot, Pneumatic system and electrical control system; the main torso of the robot includes a streamlined upper shell 1, a lower shell 2 and multiple main body buckles 6, and the streamlined upper shell 1 and lower shell 2 are sealed and installed through multiple main body buckles 6 In one body, the left forelimb of the robot and the right forelimb of the robot are installed symmetrically on both sides of the front end of the main torso of the robot, the left and right hind limbs of the robot are respectively installed symmetrically on both sides of the rear end of the main torso of the robot, and the pne...
specific Embodiment approach 2
[0023] Specific implementation mode two: combination figure 1 Describe this embodiment, a frog-like swimming robot driven by joint-type pneumatic software actuators described in this embodiment, the left forelimb of the robot includes a left forelimb trunk connector 3-1, a left forelimb flipper 4-1 and a left forelimb Joint 5-1; robot right forelimb comprises right forelimb trunk connector 3-2, right forelimb flipper 4-2 and right forelimb joint 5-2; one end of left forelimb joint 5-1 is fixed by left forelimb trunk connector 3-1 Installed on the left side of the front end of the main torso of the robot, the other end of the left forelimb joint 5-1 is fixedly connected to one end of the left forelimb flipper 4-1, and one end of the right forelimb joint 5-2 is fixedly installed through the right forelimb trunk connector 3-2 On the right side of the main torso front end of the robot, the other end of the right forelimb joint 5-2 is fixedly connected with an end of the right fore...
specific Embodiment approach 3
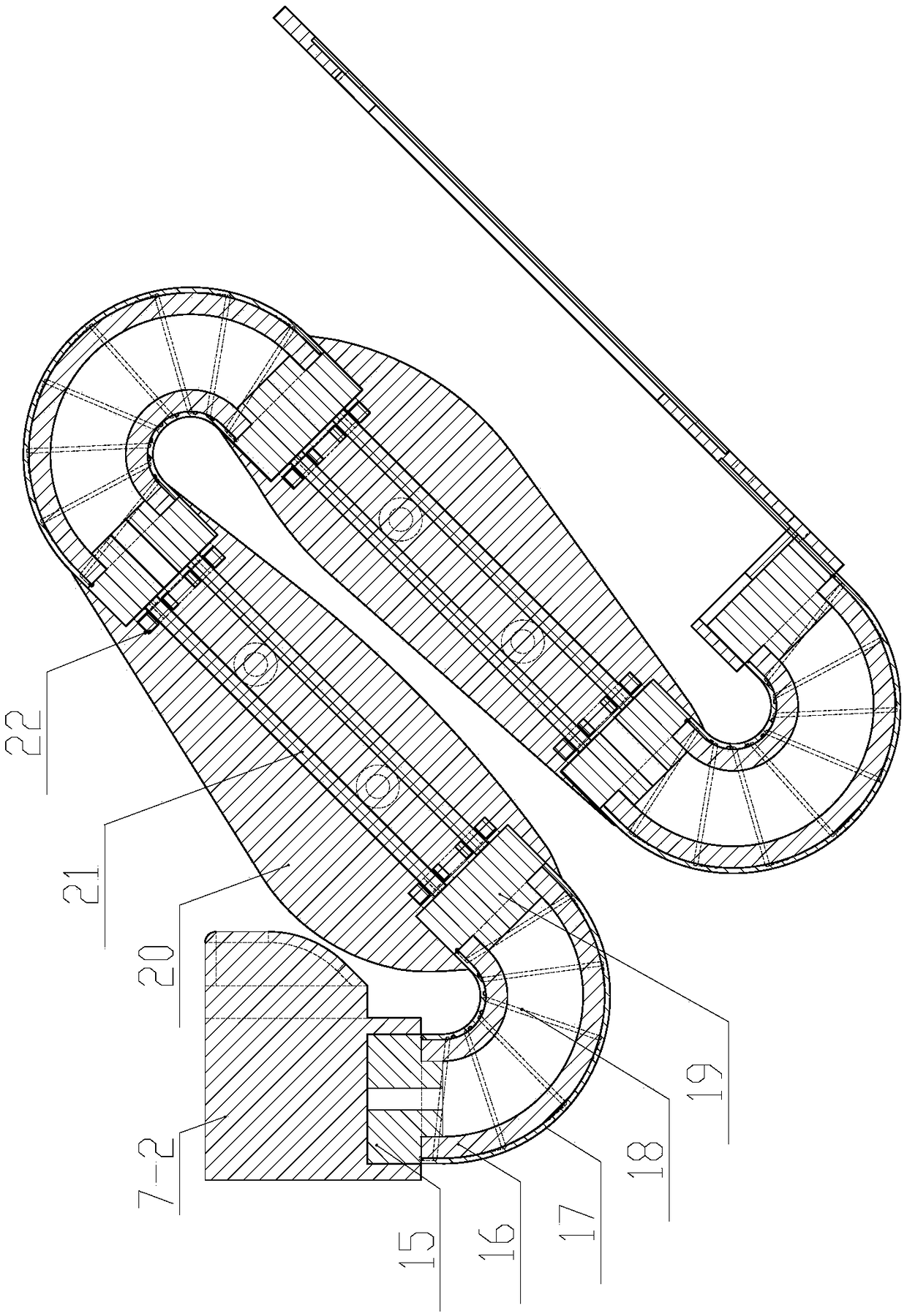
[0024] Specific implementation mode three: combination Figure 1-Figure 5 Describe this embodiment, a frog-like swimming robot driven by an articulating pneumatic soft actuator described in this embodiment, the left hind limb of the robot includes a left hind limb trunk connector 7-1, a left hind limb hip joint 8-1, a left hind limb Hind limb thigh body 9-1, left hind limb knee joint 10-1, left hind limb calf body 11-1, left hind limb ankle joint 12-1, left hind limb moving fin 13-1-1 and left hind limb fixed fin 13-1-2 The right hind limb of the robot includes right hind limb torso connector 7-2, right hind limb hip joint 8-2, right hind limb thigh body 9-2, right hind limb knee joint 10-2, right hind limb calf body 11-2, right hind limb ankle joint 12-2, right hind limb movable flipper 13-2-1 and right hind limb fixed flipper 13-2-2; left hind limb hip joint 8-1, left hind limb knee joint 10-1, left hind limb ankle joint 12-1, right hind limb The hip joint 8-2, the right hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More