

Polishing and grinding force-position mixed control method and system
A technology of mixed control and grinding force, which is applied in general control system, control/adjustment system, adaptive control, etc., can solve the problems that cannot adapt to the development requirements of grinding and polishing robots, and achieve the effect of ensuring the grinding effect and improving the control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
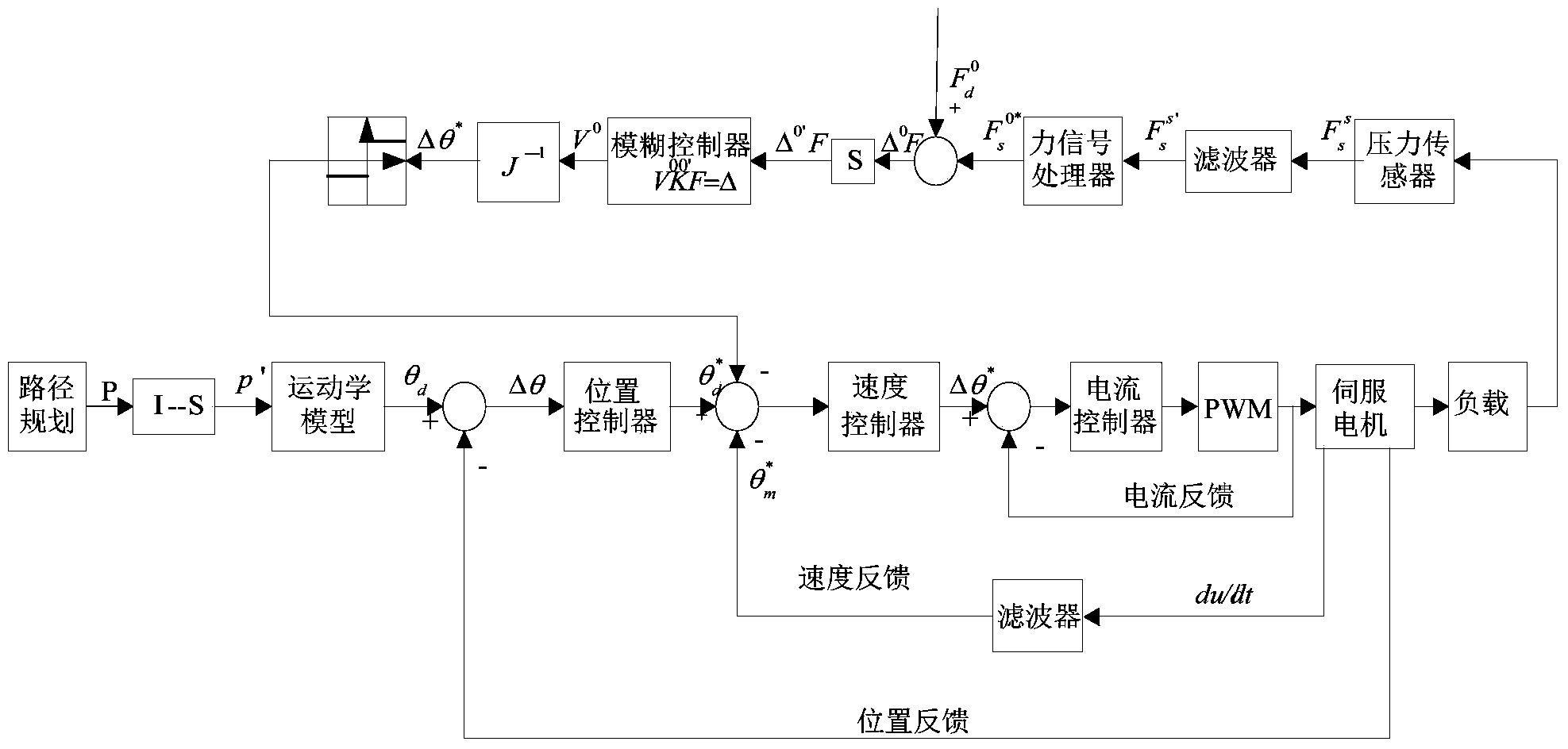
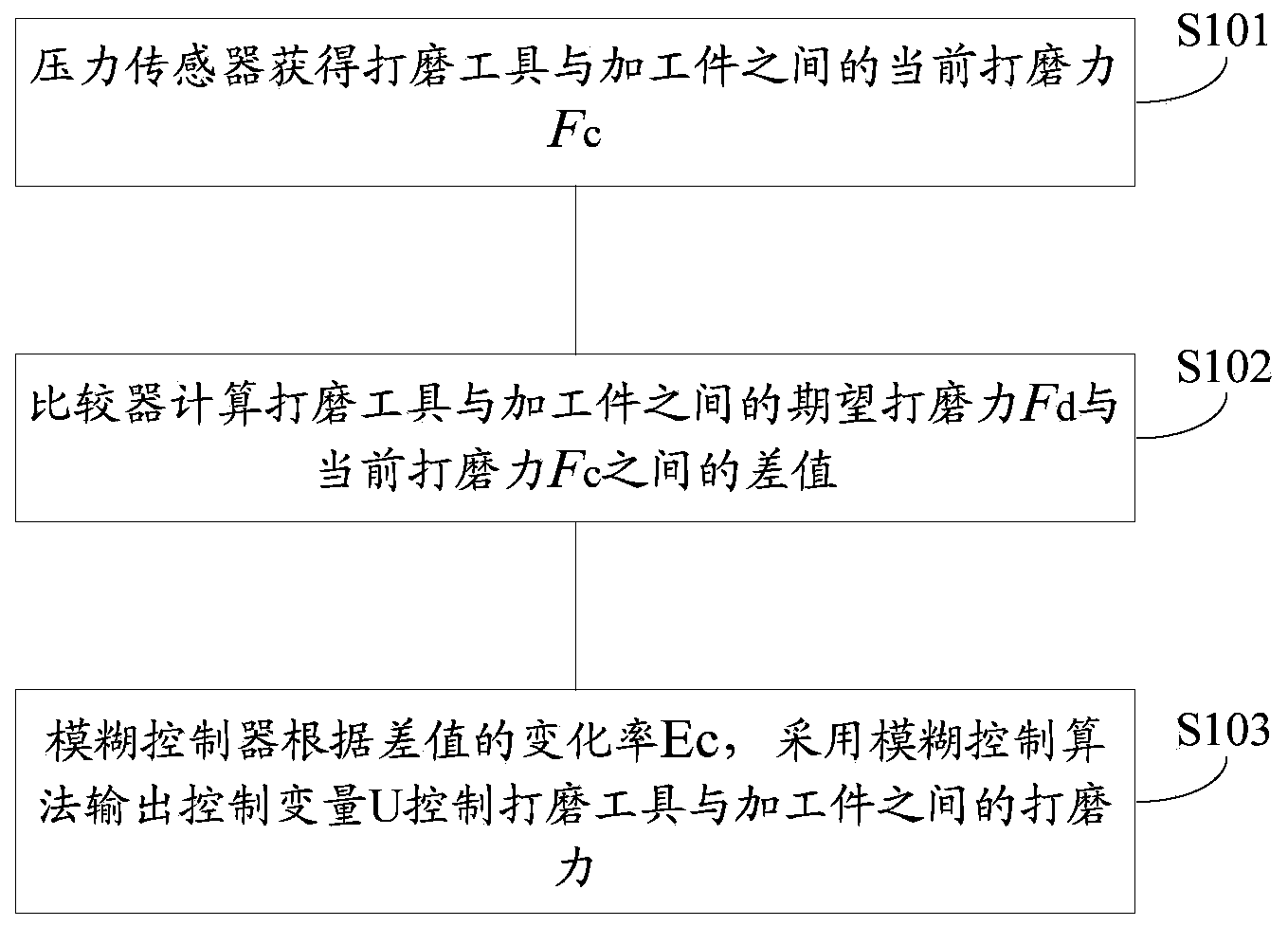
[0028] An embodiment of the present invention provides a polishing and grinding force-position mixing control method, including: a pressure sensor obtains the current grinding force Fc between the grinding tool and the workpiece; a comparator calculates the expected grinding force between the grinding tool and the workpiece The difference between Fd and the current grinding force Fc; the fuzzy controller uses a fuzzy control algorithm to output a control variable U to control the grinding force between the grinding tool and the workpiece according to the change rate Ec of the difference. The embodiment of the present invention also provides a corresponding polishing and grinding force-position mixing control system. Each will be described in detail below.
[0029] The basic flow of the polishing and grinding force-position mixing control method in the embodiment of the present invention can be referred to figure 1 , the method can be used to coordinate the grinding work of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More