

Parallel connecting rod type Delta robot forth axis transmission mechanism
A link mechanism and robot technology, applied in the field of robots, can solve the problems of heavy weight, weak technology, and increase the load of the shaft drive motor, and achieve the effect of satisfying the needs and stable and reliable operation characteristics.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in conjunction with the accompanying drawings.
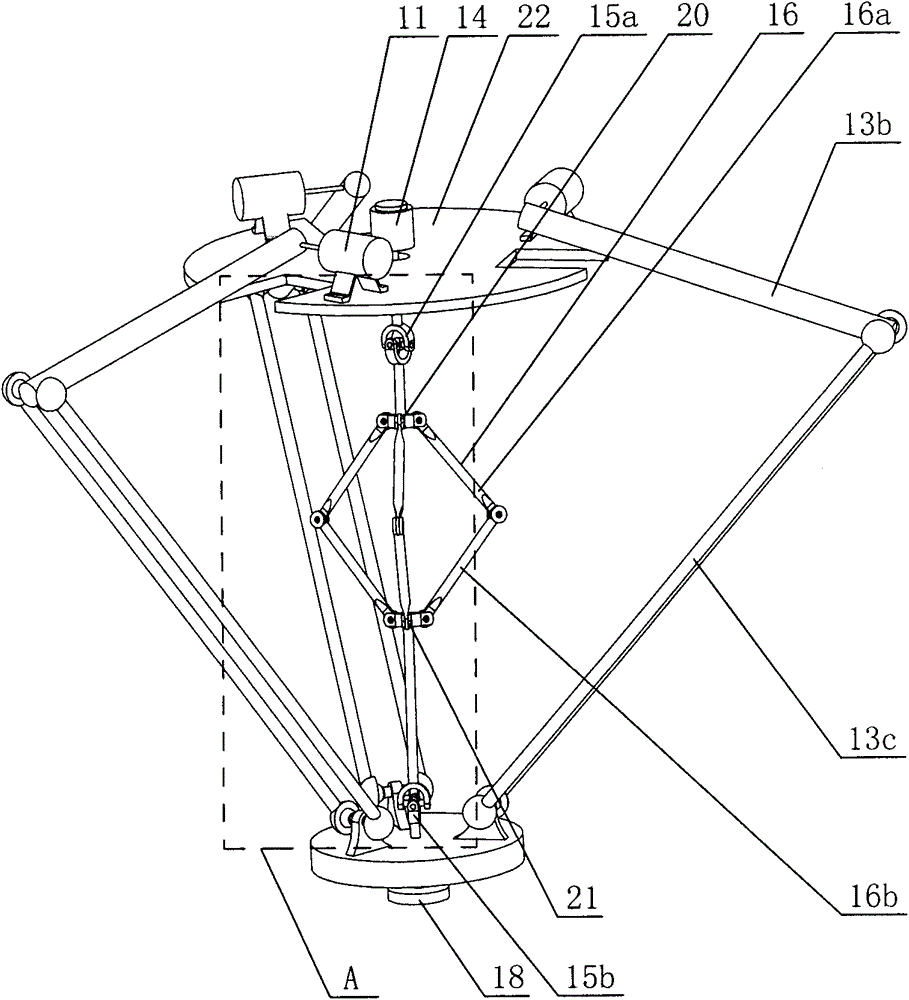
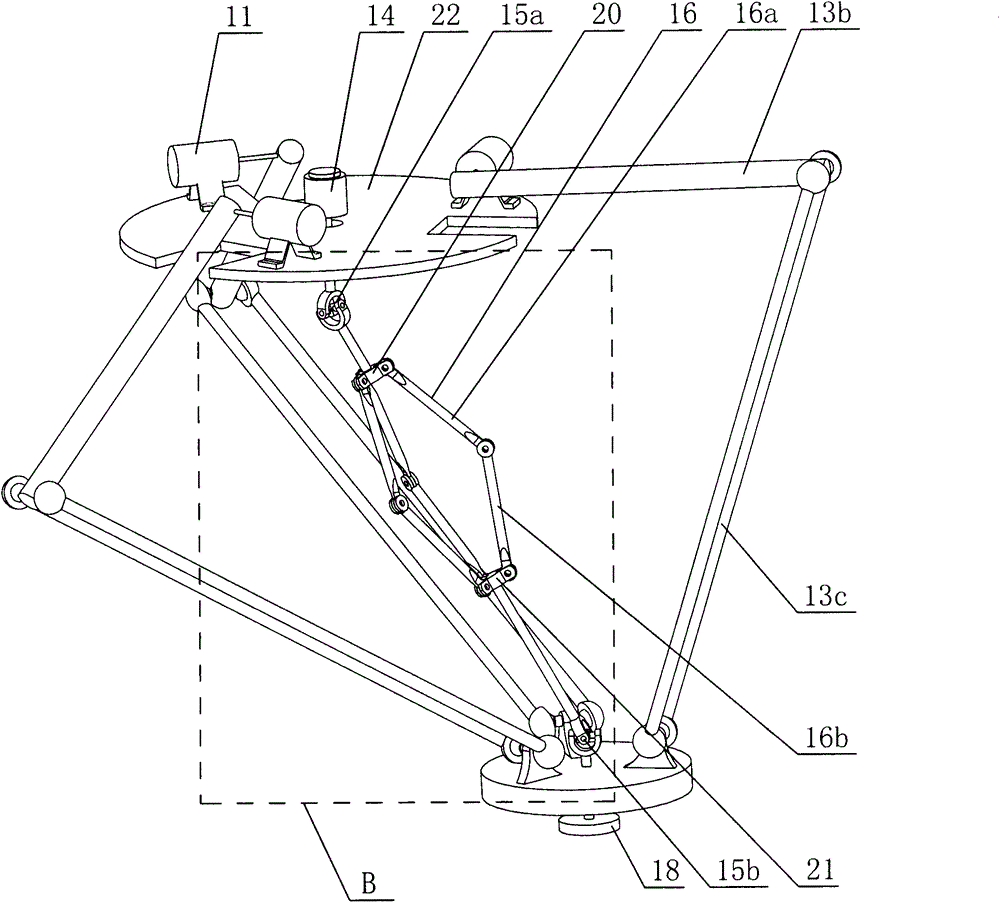
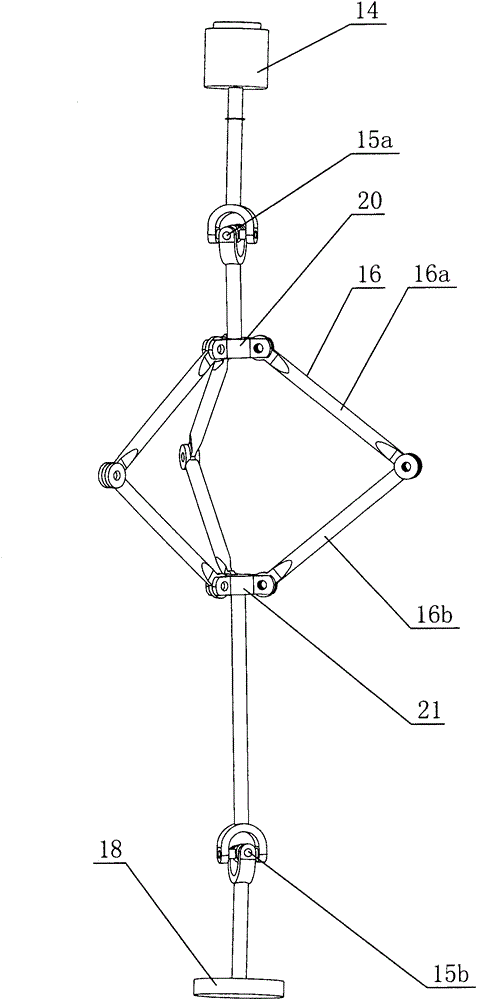
[0020] like Figure 1 to Figure 6 As shown, a fourth-axis transmission mechanism of a Delta robot in the form of parallel links includes a drive motor 14, an upper universal joint 15a, and a lower universal joint 15b. The fourth-axis transmission mechanism of a Delta robot in the form of parallel links It also includes a parallel link mechanism 16 and a working platform 18, the output shaft of the drive motor 14 is connected to the upper end universal joint 15a, the upper end universal joint 15a is connected to the upper diagonal shaft 20 of the parallel link mechanism 16, and the parallel link mechanism 16 The lower end diagonal shaft 21 is connected with the lower end universal joint 15b, and the lower end universal joint 15b is connected with the working platform 18.
[0021] Described parallel link mechanism 16 comprises three groups of connecting rods, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More