

Under-actuated self-adaptive type stair climbing wheelchair
An adaptive, under-actuated technology, applied in the patient's chair or special transport, vehicle ambulance, medical transport and other directions, it can solve the problem of people with physical disabilities and bring enough help, unable to complete the up and down stairs independently Action, wheelchair tipping and other problems, to achieve the effect of compact structure, high transmission efficiency, stable and reliable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with accompanying drawing and specific embodiment the present invention is further described in detail:
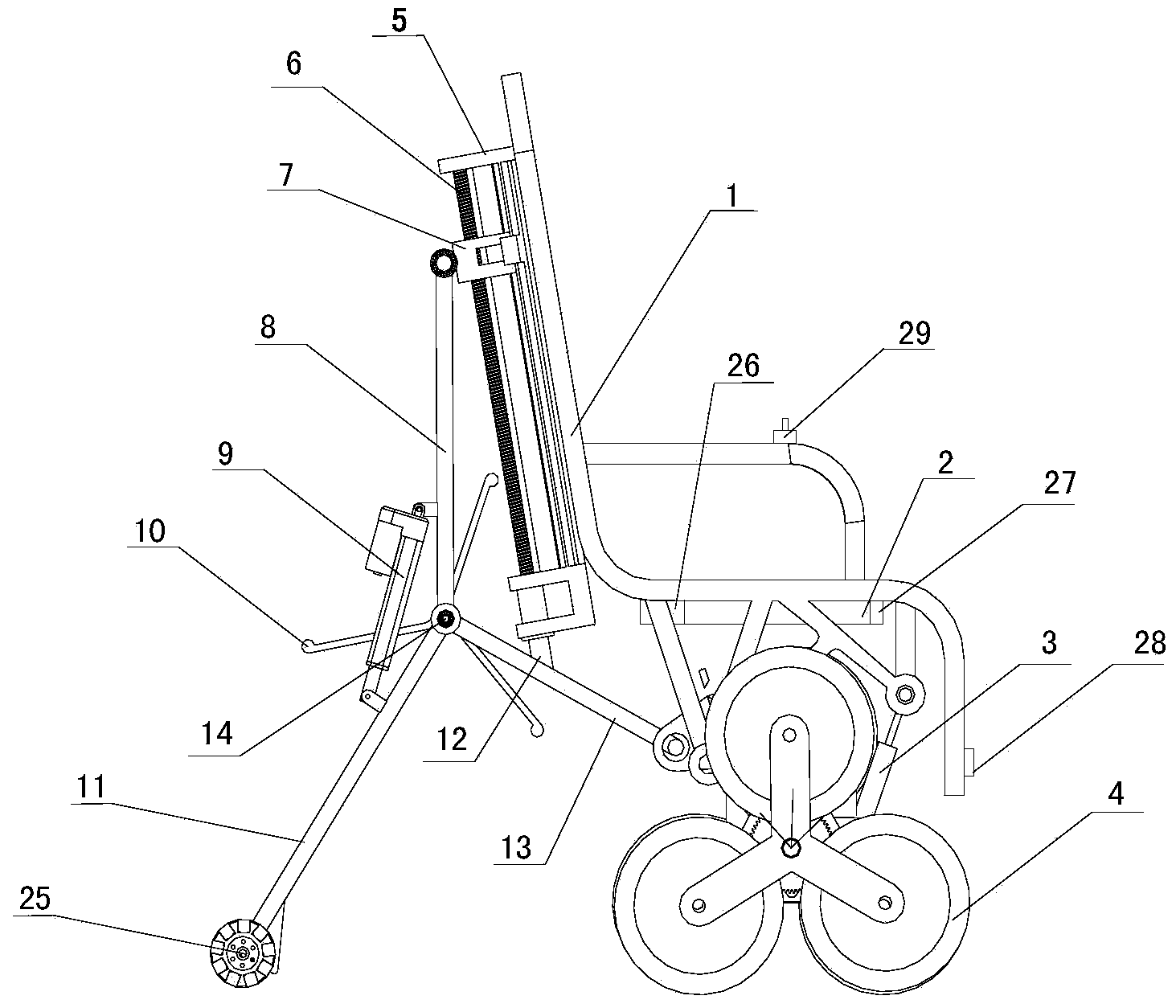
[0026] Such as Figure 1 ~ Figure 4 As shown, an underactuated adaptive stair climbing wheelchair includes a chair frame main body 1, a battery 2, a balance mechanism, a drive system and a control system, and the battery 2 is fixed on the lower part of the seat of the chair frame main body 1;
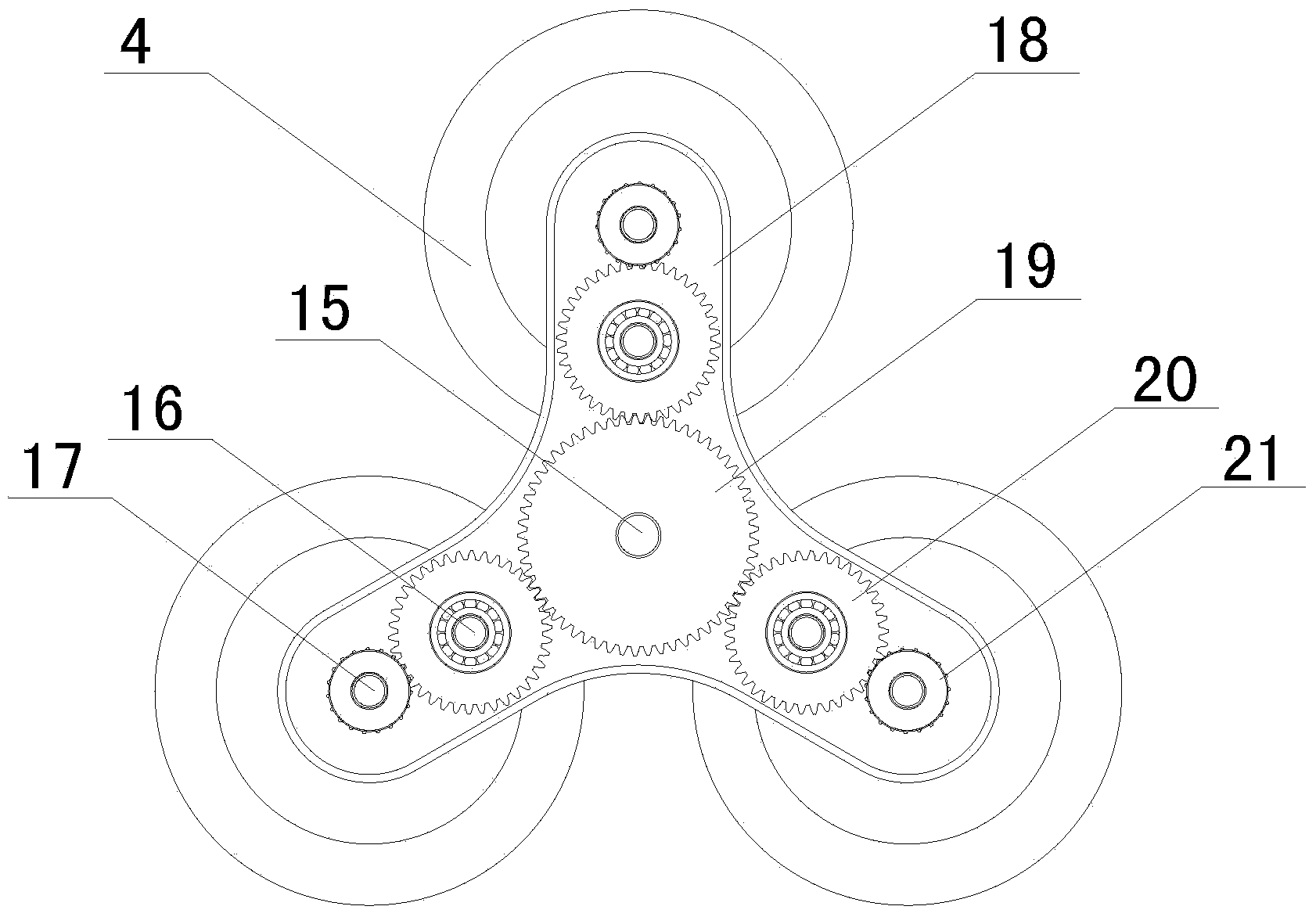
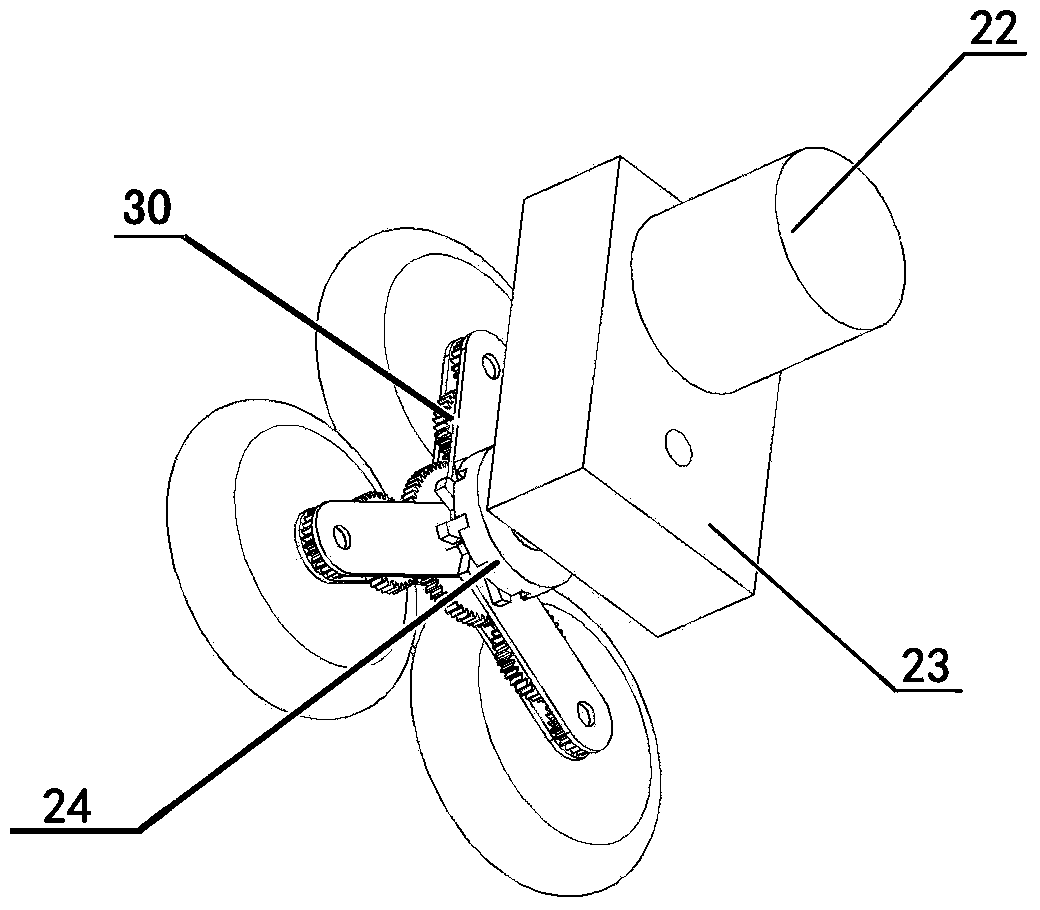
[0027] The drive system includes a gearbox 23, a main motor 22 and an under-actuated wheel train 30. The drive system is provided with a set of left and right sets on the chair frame main body 1, and the turning can be realized by the rotation difference between the left and right sets of drive systems. The housing rear part of the gearbox 23 is hinged on the bottom of the chair frame main body 1, the front part of the gearbox 23 housing is hinged to one end of the shock absorber 3, and the other end of the shock absorber 3 is connected to the bottom of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More