

Motion planning and controlling method for tractor-trailer mobile robot in complex environment
A mobile robot and motion planning technology, applied in two-dimensional position/channel control, adaptive control, general control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
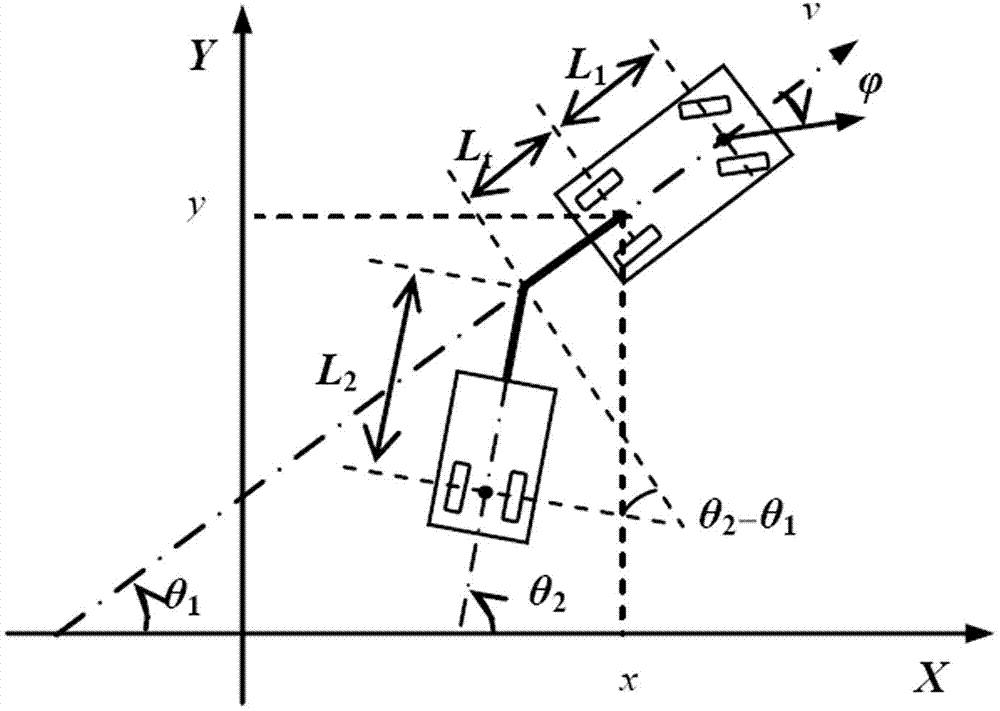
[0035] The motion planning and control method of the trailer-type mobile robot in the complex environment of the present invention, such as figure 1 As shown in Fig. 1, the configuration diagram of the tractor and the trailer and the setting diagram of the vehicle body parameters are given. The trailer-type mobile robot includes the tractor and the trailer, and the tractor and the trailer are connected by a link point. Angle sensor used to measure the rotation angle of the longitudinal line of the trailer relative to the longitudinal line of the tractor; the tractor is driven by the rear wheels and steered by the front wheels, and the steering angular velocity of the front steering wheels of the tractor is , the longitudinal speed of the tractor is , and there is no slippage between the wheels and the ground; the distance between the driving wheel an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More