

Handling method for preventing stair cleaning robot from falling off and collision during moving on step
A cleaning robot and processing method technology, applied in the field of anti-fall and collision processing, can solve the problems of collision and stair cleaning robot falling, and achieve the effect of high versatility and reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
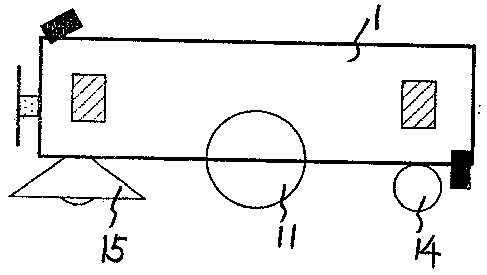
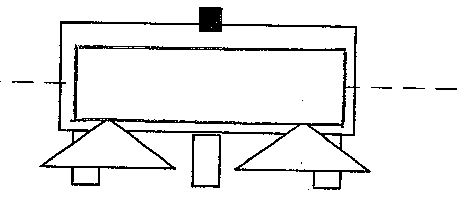
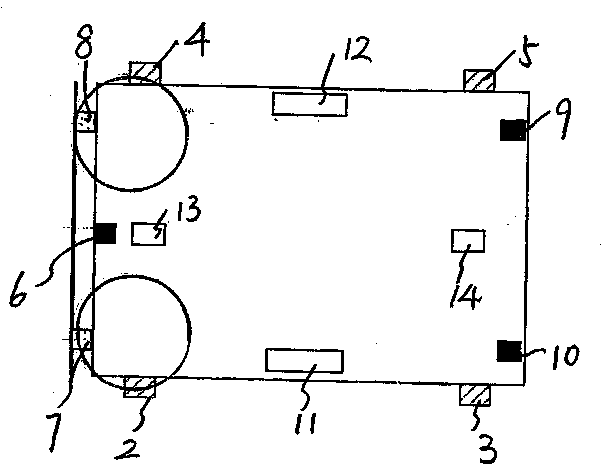
[0027] A method for anti-falling and collision treatment when a stair cleaning robot moves on the steps. The robot 1 includes: two drive wheels 11, 12 under the body to drive the robot forward, backward and turn; A universal wheel front wheel 13 and universal wheel rear wheel 14 play a role in supporting the robot on the one hand, and facilitate the robot to turn on the other hand; driving wheels 16, 17 are also housed below the body; The first and second distance measuring sensors 2, 3 and the third and fourth distance measuring sensors 4 and 5 are respectively installed on both sides to detect when the robot walks on the steps, the distance between the side of the body and the kick surface of the upper step distance, so that it is within a safe range to ensure that the robot does not fall or collide; the first proximity sensor 6 that detects obliquely downwards is installed above the front end of the robot body, and the first and second contact sensors 7 and 8 are installed a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More