Method and device for locating object through object detection results of multiple stereo cameras
一种立体相机、定位方法的技术,应用在图像处理领域,能够解决融合结果分裂、融合歧义等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0031] Figure 4 A general flowchart of a method for locating an object by using object detection results of multiple stereo cameras according to the first embodiment of the present invention is shown.
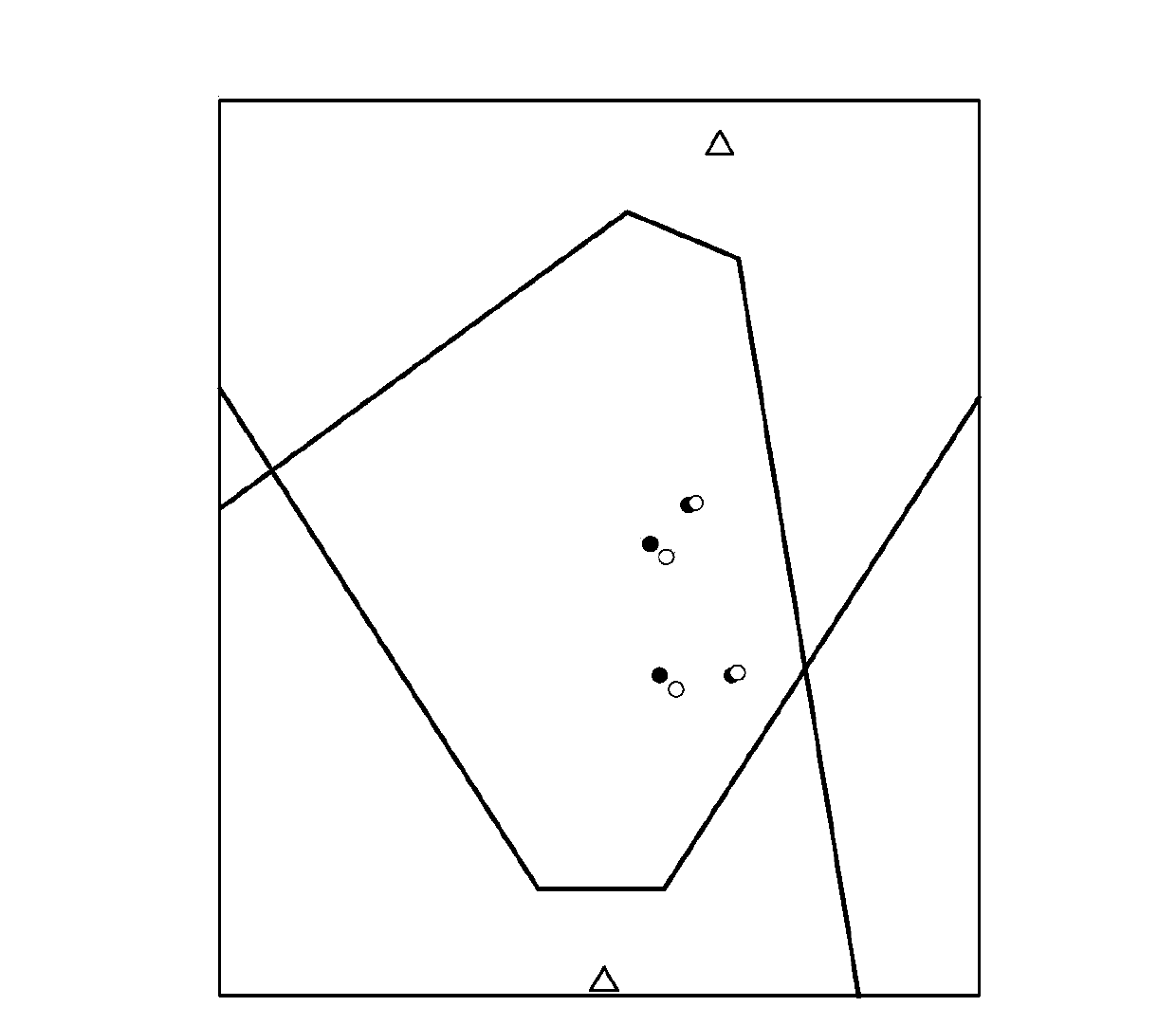
[0032] Such as Figure 4As shown, in step S41, a plurality of position information of the object generated by the continuous tracking and detection of the object by each of the stereo cameras is acquired.
[0033] Since each stereo camera performs continuous tracking and detection on the object, for each object detected by each camera, a plurality of position information corresponding to different detection times will be obtained. For example, taking two stereo cameras A and B for tracking detection as an example, using the format defined by expression (1), the position information generated by the tracking detection of camera A is expressed as follows:
[0034] { t A 0 , ( ...
no. 2 example
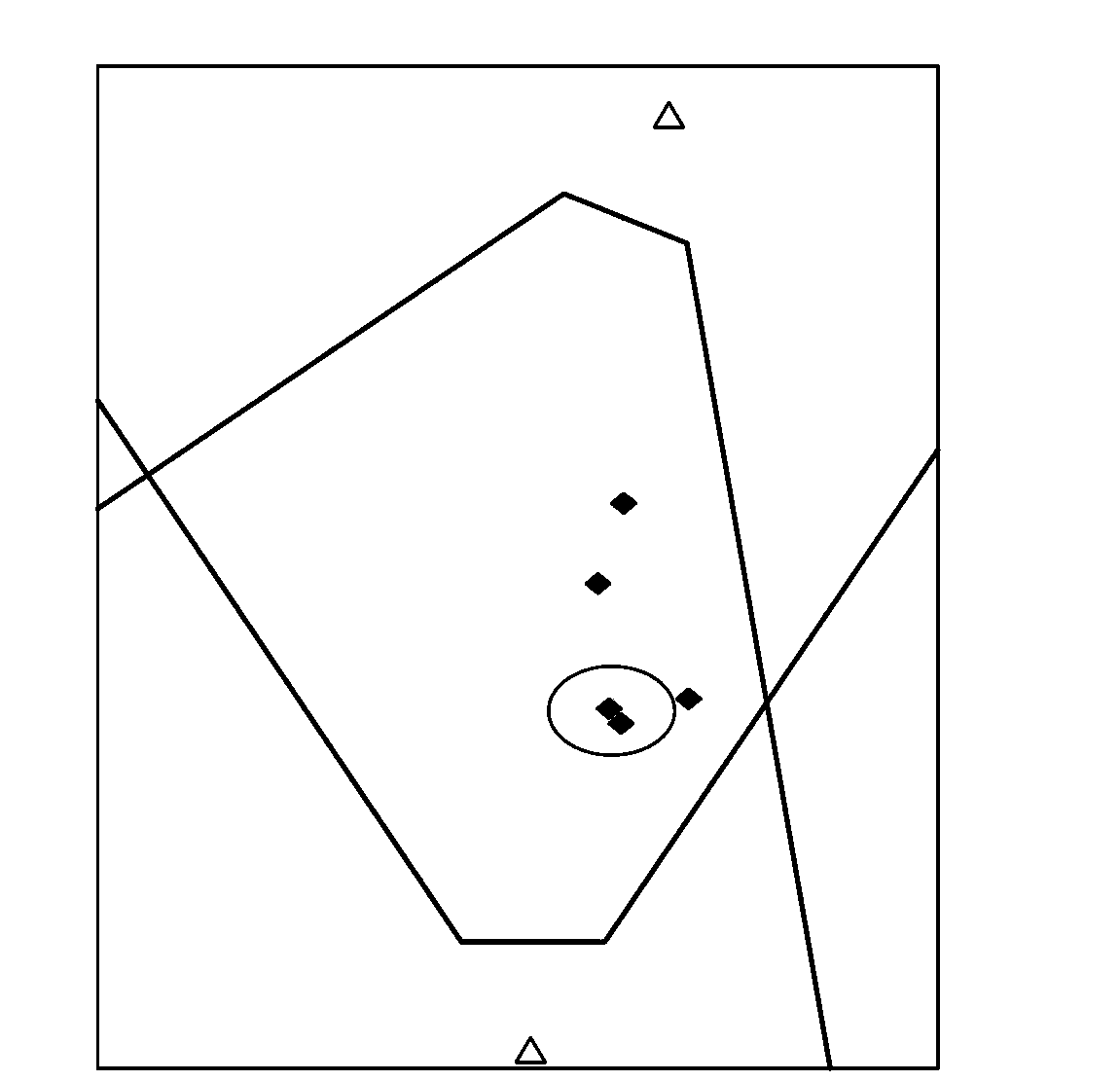
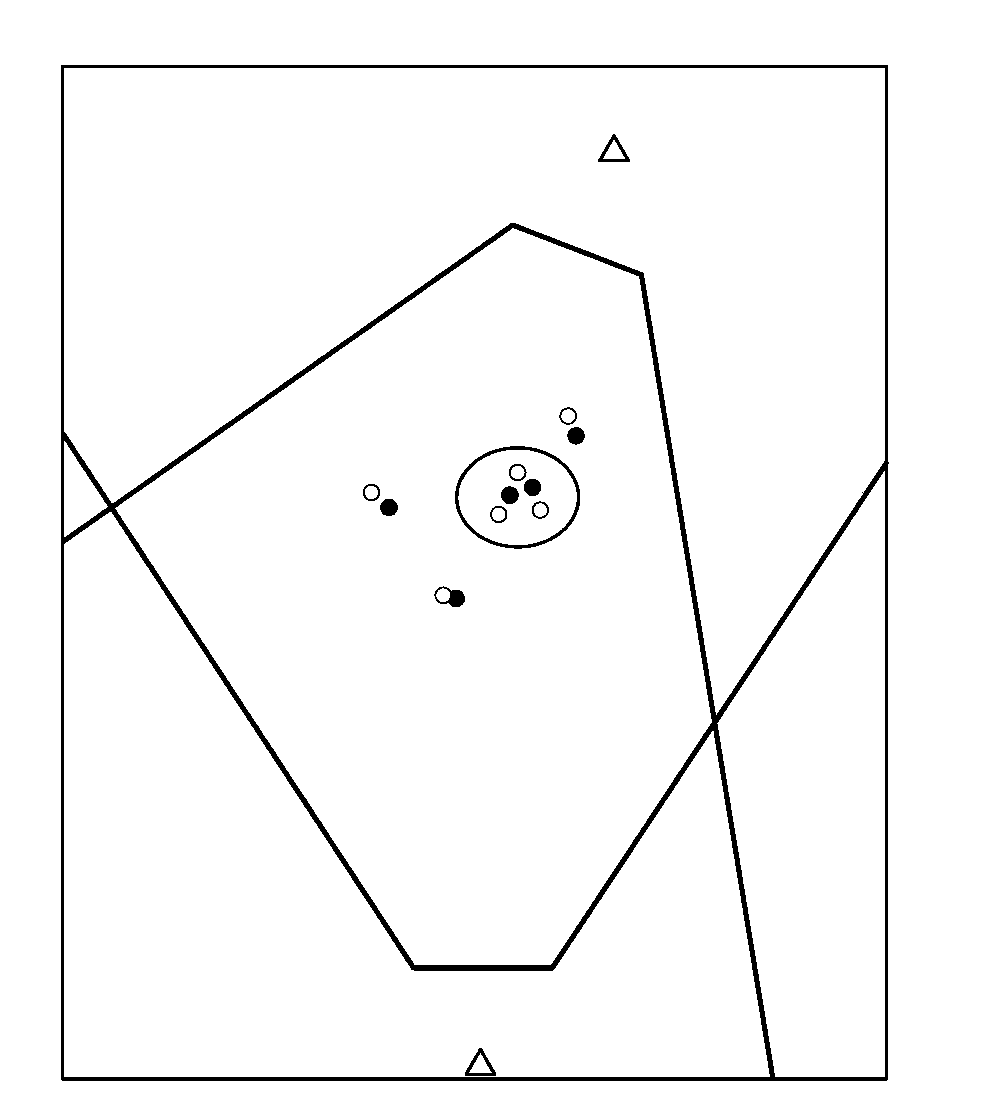
[0091] The object positioning method according to the second embodiment of the present invention is described below.
[0092] The object location method according to this embodiment is basically the same as the method in the first embodiment, the only difference being that after the object track is formed in step S42, the timestamp resampling synchronization process is performed. Taking the two trajectories shown in expression (6) as an example, the two trajectories corresponding to camera A and camera B have the same data length n, but due to the shooting frame rate and detection and tracking processing speed of each camera difference, there is no guarantee that Trajectory a Timestamp t in i and Trajectory b Timestamp t in i exactly the same. If the shooting frame rate of each camera is high, it can be considered that the difference between the time stamps has little effect on the final positioning result and can be ignored; however, if the shooting frame rate of each cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com