

Spectrum sensing method based on non-refactoring framework
A spectrum sensing and framework technology, applied in the field of spectrum sensing based on a non-reconfiguration framework, which can solve the problems of complex algorithms, inability to sense spectrum, and low utilization of spectrum resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
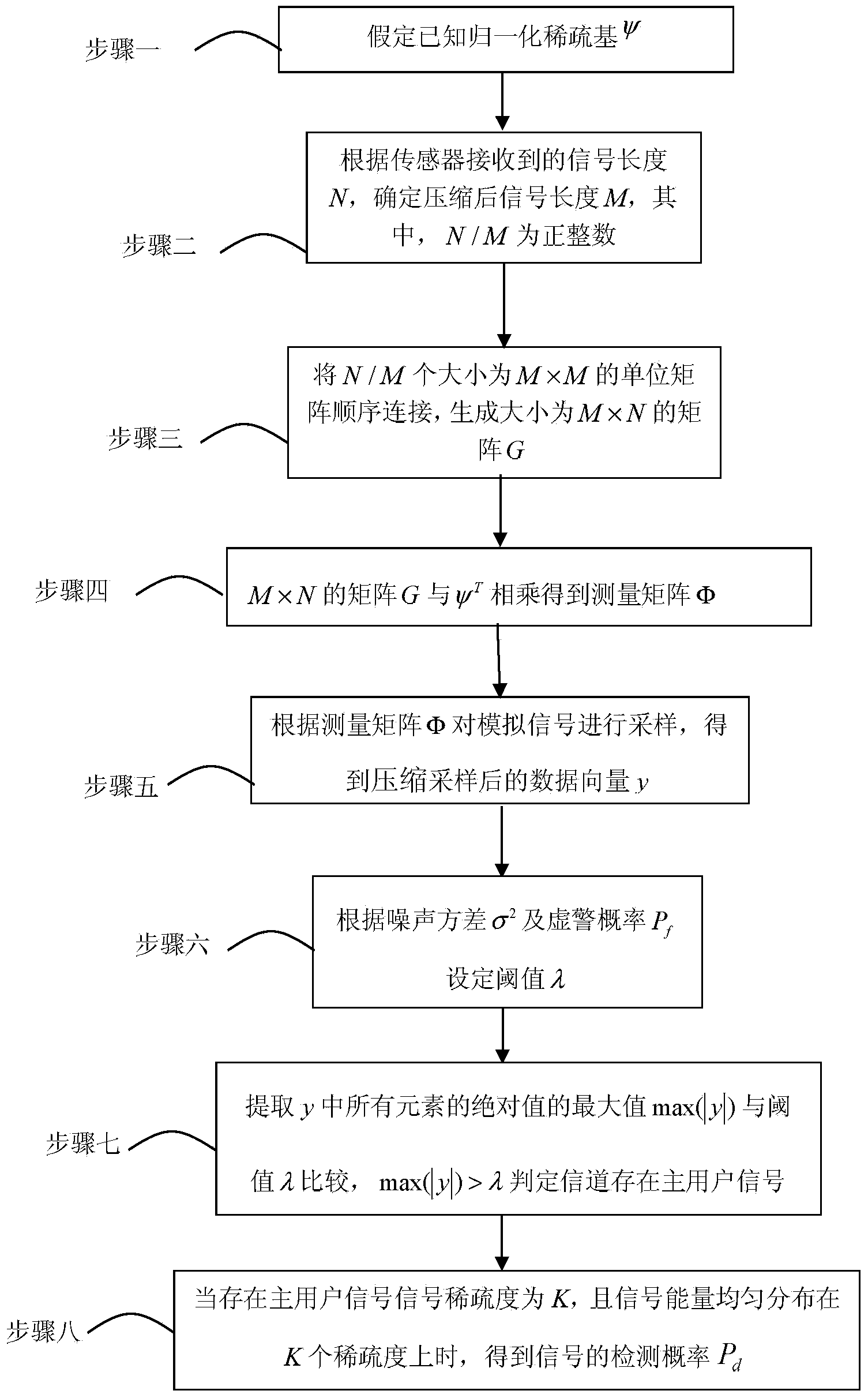
[0030] Specific implementation mode 1: A spectrum sensing method based on a non-reconfiguration framework in this implementation mode is specifically prepared according to the following steps:
[0031] Step 1. Assume that the normalized sparse basis ψ is known;
[0032] Step 2. Determine the compressed signal length M according to the row number N of ψ, wherein N / M is a positive integer;
[0033] Step 3, sequentially connecting N / M identity matrices with a size of M×M to generate a matrix G with a size of M×N;
[0034] Step 4, M×N matrix G and ψ T Multiply to get the measurement matrix Φ;
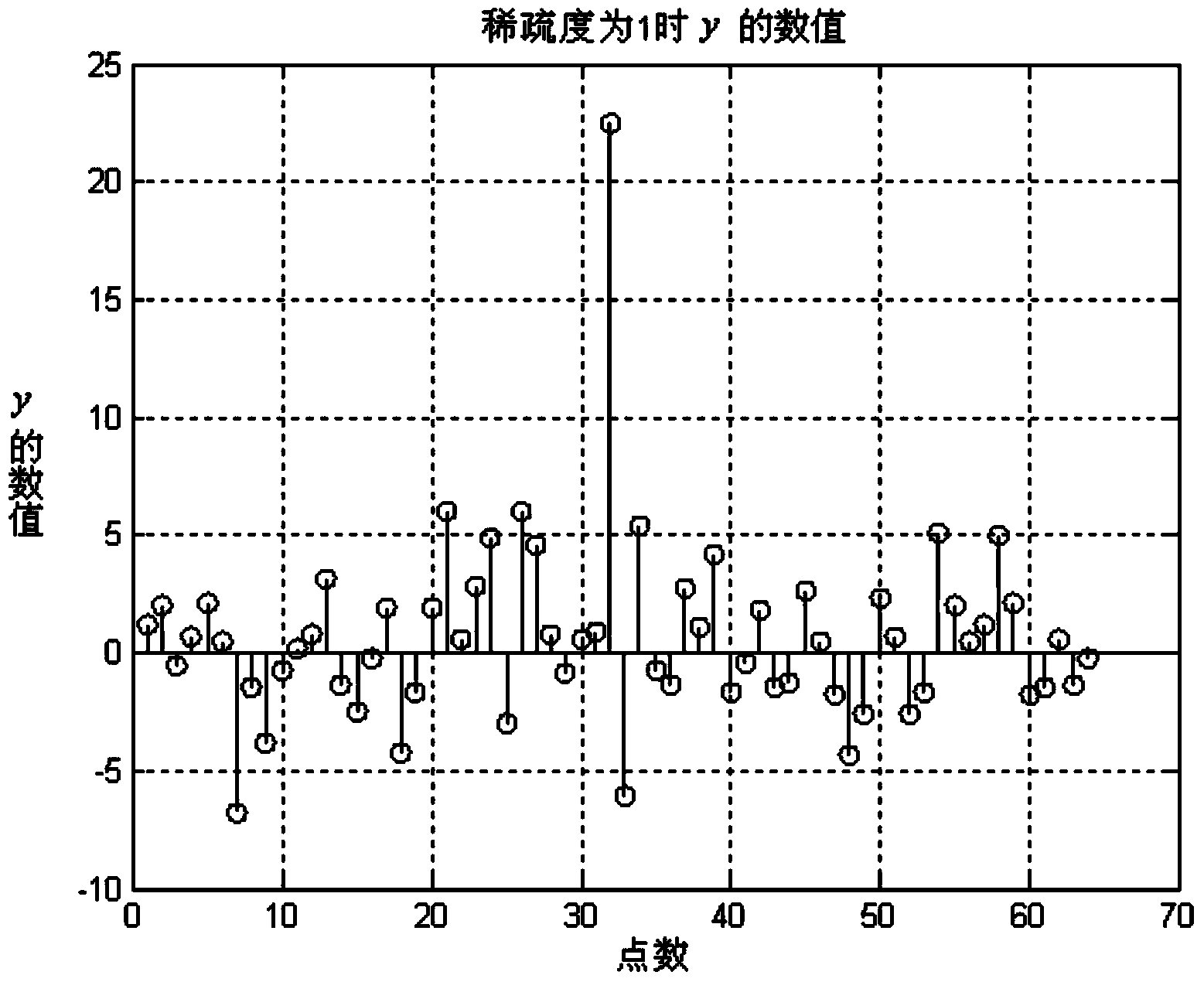
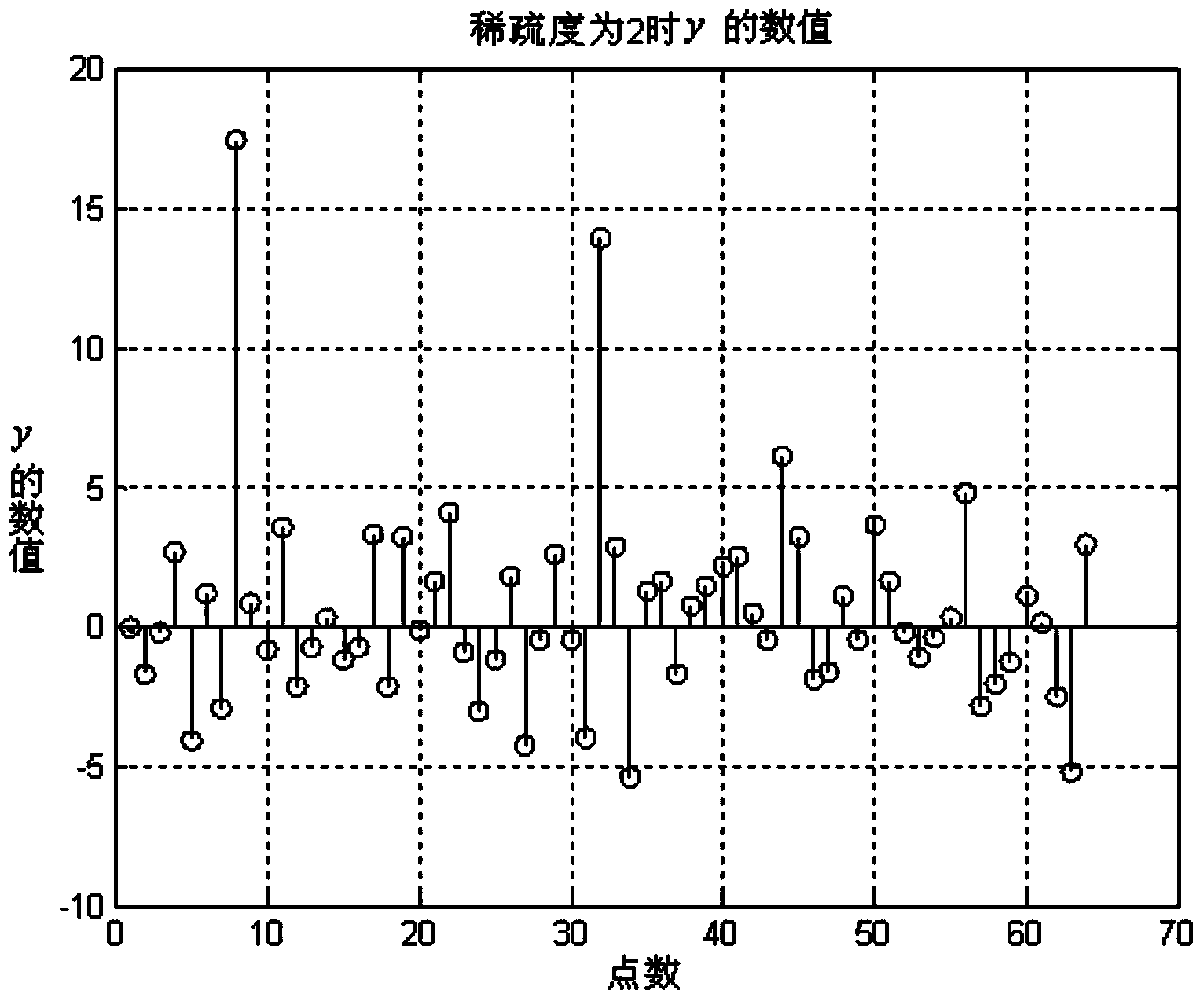
[0035] Step 5: Sampling the signal according to the measurement matrix Φ to obtain the compressed and sampled data vector y;
[0036] Step 6. According to the noise variance σ 2 and false alarm probability P f Set the threshold λ;
[0037] Step 7: Extract the maximum value max(|y|) of the absolute values of all elements in y and compare it with the threshold λ, max(|y|)>λ determines...
specific Embodiment approach 2
[0043] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in step 3, N / M unit matrices with a size of M×M are sequentially connected to generate a matrix G with a size of M×N as an M×N matrix , N is the length of the signal x, which is formed by connecting N / M M×M unit matrices, and the specific form is shown in formula (4):
[0044] (4). Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0045] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the matrix G and ψ of M×N in step four T The specific process of multiplying to get the measurement matrix Φ is:
[0046] Assuming that the signal x itself is not sparse, the signal x is represented by a sparse vector s under the orthogonal sparse transformation, which is recorded as x=ψs, where the sparsity of s is K (only K non-zero elements), and ψ is the normalization of N×N Sparse basis; the signal after compressed sampling is
[0047] x ‾ = Φx - - - ( 1 )
[0048] Rewrite (1) as:
[0049] x ‾ = Φψs - - - ( 2 )
[0050] in, It is a vector of M rows and 1 column, that is, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More