

Four-degree-of-freedom parallel mechanism with three-dimensional translation and one-dimensional rotation
A technology of three-dimensional translation and degree of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as small working space, and achieve simple control, easy calibration, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
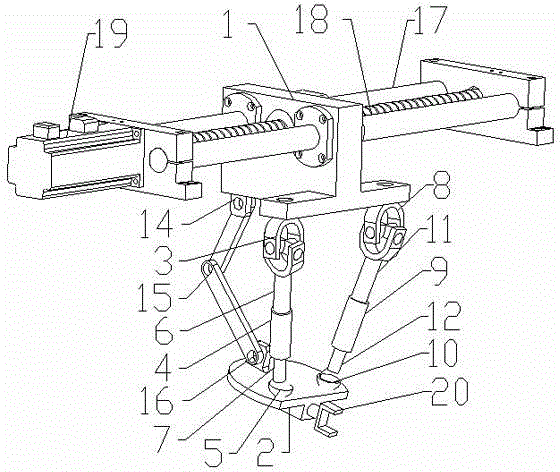
[0018] Such as figure 1 The shown four-degree-of-freedom parallel mechanism with three-dimensional translation and one-dimensional rotation is composed of a two-dimensional translation and one-dimensional rotation parallel mechanism and a linear motion mechanism. The linear guide rail 17, the ball screw 18 and the drive motor 19 form a linear motion mechanism. The specific structural diagram of the two-dimensional translation and one-dimensional rotation parallel mechanism is as follows: Figure 5 shown. A moving platform 2 is arranged above the fixed platform 1, and the fixed platform is connected to the moving platform through three sets of motion branch chains. The first group of motion branch chains is provided with a moving pair 4, the moving pair 4 is connected to the connecting rod 6 and the connecting rod 7, the connecting rod 6 is directly connected to the fixed platform through the universal joint 3, and the connecting rod 7 is connected to the moving platform thro...
Embodiment 2
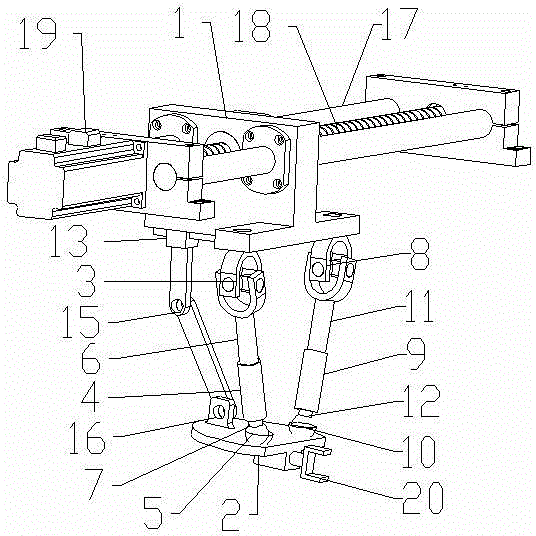
[0020] Such as figure 2 The four-degree-of-freedom parallel mechanism with three-dimensional translation and one-dimensional rotation shown is composed of a two-dimensional translation and one-dimensional rotation parallel mechanism and a linear motion mechanism. The specific structural diagram of the two-dimensional translation and one-dimensional rotation parallel mechanism is as follows: Figure 6 shown. Among them, the third group of kinematic branch chains is connected with the moving platform through the rotating pair 16, the middle kinematic pair of the third group of kinematic branch chains is the rotating pair 15, and the kinematic pair connected with the fixed platform 1 in the third group of kinematic branch chains is the moving pair Deputy 13. Other structures are the same as those in Embodiment 1, and will not be repeated here.
Embodiment 3
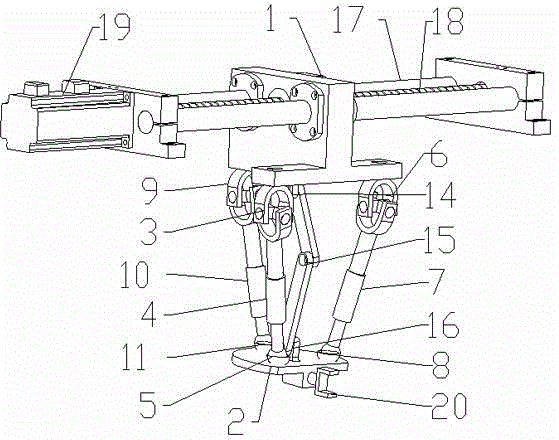
[0022] Such as image 3 The four-degree-of-freedom parallel mechanism with three-dimensional translation and one-dimensional rotation shown is composed of a two-dimensional translation and one-dimensional rotation parallel mechanism and a linear motion mechanism. The specific structural diagram of the two-dimensional translation and one-dimensional rotation parallel mechanism is as follows: Figure 7 shown. The fixed platform 1 is connected to the moving platform 2 through four sets of kinematic branch chains, the first group of kinematic branch chains is connected to the fixed platform 1 through the universal joint 3, and the kinematic pairs connected with the moving platform 2 in the first group of kinematic branch chains are The ball pair 5 is provided with an intermediate moving pair 4 in the first group of motion branch chains. The structure of the second and third groups of kinematic branch chains is the same as that of the first group of kinematic branch chains. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More