Road vanishing point detection method based on video images
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of video images and detection methods, applied in image analysis, image data processing, instruments, etc., can solve problems such as high error rate, complex voting algorithm, time consumption, etc.
Active Publication Date: 2014-09-17
HARBIN INST OF TECH
View PDF0 Cites 25 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] The purpose of the present invention is to propose a road vanishing point detection method based on video images to solve the problem that the existing detection method has a high error rate, the traditional voting algorithm is more complicated, and most of the time is consumed in the voting algorithm. And there is a problem of large amount of calculation when using the multi-scale and multi-directional characteristics of Gabor wavelet for texture feature extraction
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
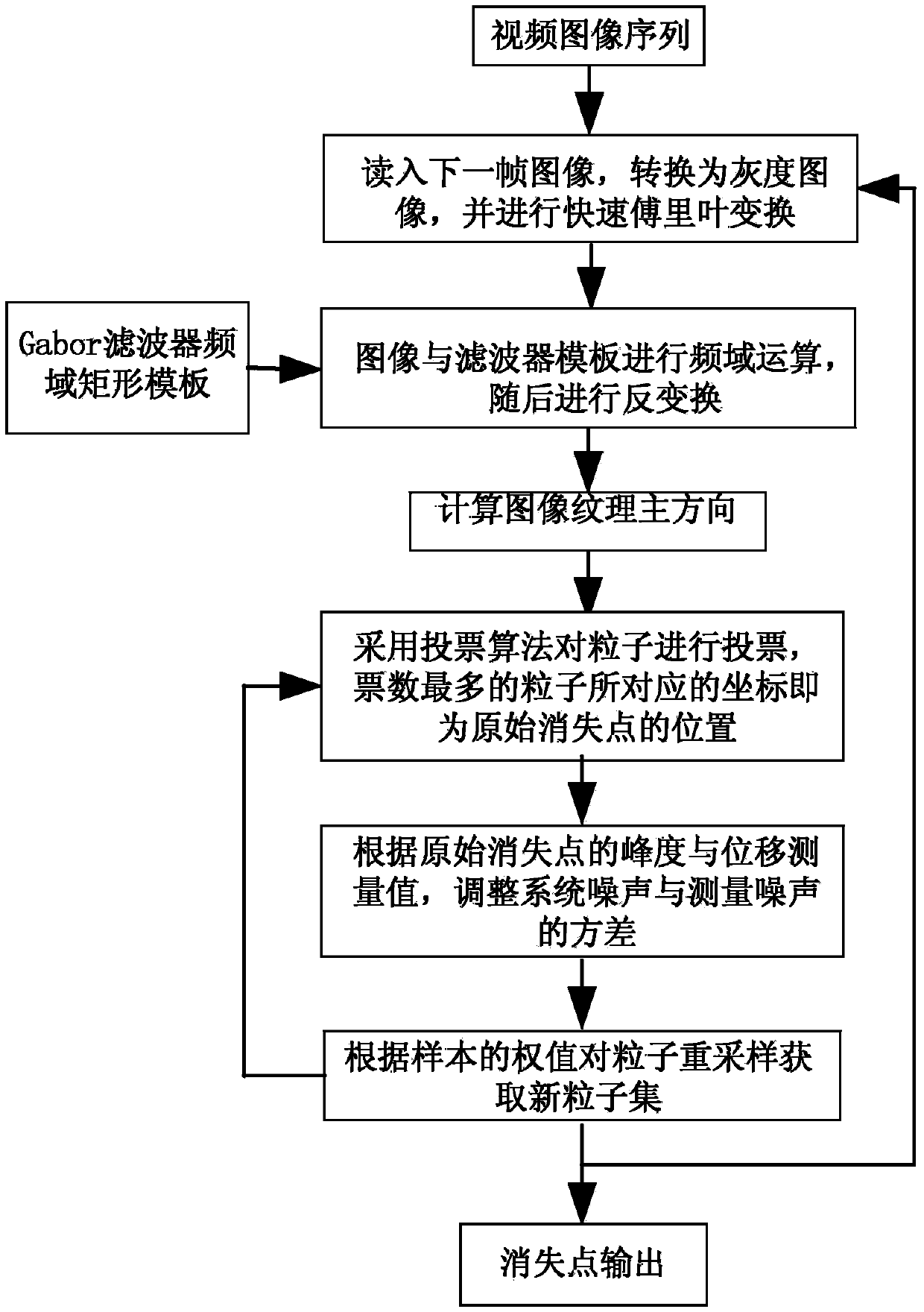
[0038] Specific embodiment one: a kind of road vanishing point detection method based on video image described in this embodiment, comprises the following steps:
[0039] Step 1. Input a frame of image data I(x,y), convert it into a grayscale image and perform fast Fourier transform F{I(x,y)}, where x and y are the X axes of image pixels and Y-axis coordinates;
[0040] Step 2, the calculation of the texture response range based on the Gabor filter;
[0041] Step 3: Calculate the main direction of the image texture, the specific process is:
[0042] Step 31. Response to texture Sort in descending order to get E 1 ,E 2 ,E3 ,E 4 , and the corresponding Gabor filter angles are φ 1 , φ 2 , φ 3 and φ 4 ; where the Gabor filter used has a scale of s and a direction of φ i ;
[0043] Step three and two, define the confidence level of each pixel p(x,y): conf(p)=(E 1 -E 4 ) / E 1 , if the confidence conf(p) is greater than the predefined constant δ c And the maximum textu...
specific Embodiment approach 2
[0061] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the calculation process described in step two is as follows:
[0062] Step 21, construct Gabor filter rectangular templates in four directions of 0°, 45°, 90°, and 135°, and perform fast discrete Fourier transform on the rectangular templates to obtain Scale is s, direction is φ i The time-domain form of the Gabor filter is as follows:
[0063] g s , φ i ( x , y ) = ω 2 π c e - ω 2 ( 4 a ...
specific Embodiment approach 3
[0069] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the process of calculating the number of votes of particles described in step four is:
[0070] Step 41. Calculate the Euclidean distance d between the pixel p(x,y) and the particle v(i,j) and normalize it. On this basis, construct a distance function The process is as follows:
[0071] d = ( x - i ) 2 + ( y - j ) 2 - - - ( 7 )
[0072]
[0073] D ( p ) = L ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a road vanishing point detection method, in particular to a road vanishing point detection method based on video images, and belongs to the field of road detection. The problems that an existing detection method is high in error rate, a traditional voting algorithm is complex, most of time is consumed by the voting algorithm, and the calculation quantity is large when the multi-scale and multi-direction characteristics of Gabor wavelets are used for extracting textural features are solved. The road vanishing point detection method is characterized by including the steps that a frame of image data are input and converted into a gray level image, and fast Fourier transform is carried out; the textural response range is calculated based on a Gabor filter; the main direction of image textures is calculated; the number of votes of particles is calculated; the range of particle distribution is adjusted; a dynamic observation model for vanishing points is set up; particle filtering is performed, and the vanishing points are output. The road vanishing point detection method can be applied to computer vision systems including an autonomous navigation system of an intelligent walking robot or a pilotless automobile and the like.
Description
technical field [0001] The invention relates to a method for detecting a road vanishing point, in particular to a method for detecting a road vanishing point based on a video image, and belongs to the field of road detection. Background technique [0002] Roads can be divided into structured roads and unstructured roads. Structured roads have relatively clear road markings and outline edges, and the road color is quite different from the surrounding environment. In comparison, unstructured roads are often not paved with cement or asphalt, and lack obvious road marking lines and boundaries. At the same time, the color of the road is often not significantly different from the surrounding background, such as muddy roads, snow or deserts, etc., making unstructured The reliable detection of roads has become a difficult point. In recent years, researchers at home and abroad have proposed a variety of vanishing point detection algorithms. However, due to the interference of strong ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More