

System and method for remotely monitoring automatic welding of mobile robot based on FPGA
An autonomous welding and remote monitoring technology, applied in welding equipment, laser welding equipment, metal processing equipment, etc., can solve the problems of only segmented welding, unable to complete welding seam at one time, unable to remotely display welding scene images, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings.
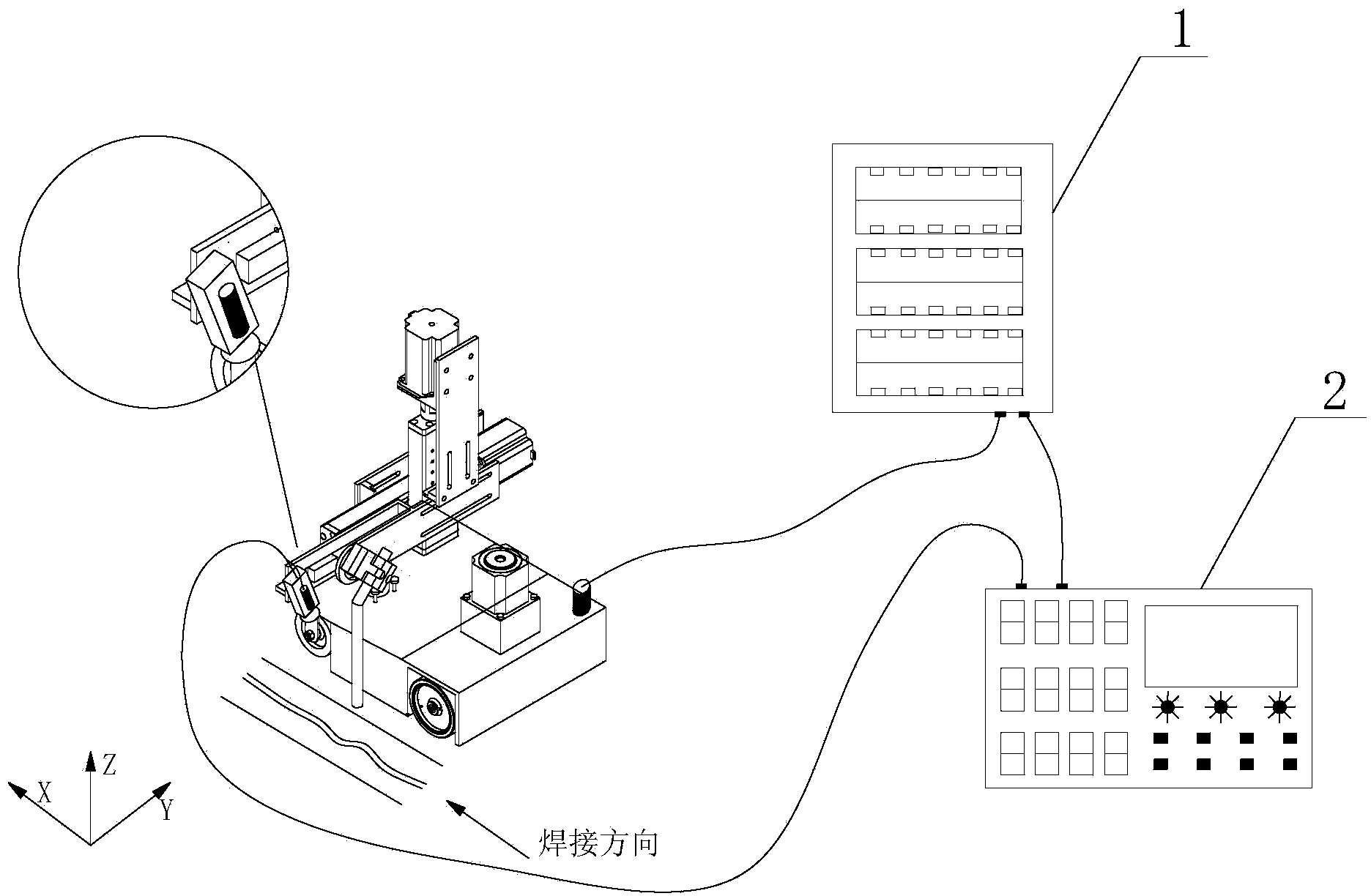
[0033] Such as figure 1 As shown, the FPGA-based remote monitoring mobile autonomous welding robot system structure includes:
[0034] The system includes: a welding robot, a welding seam position detection sensor system, a control cabinet 1 and an FPGA-based remote operation controller 2;
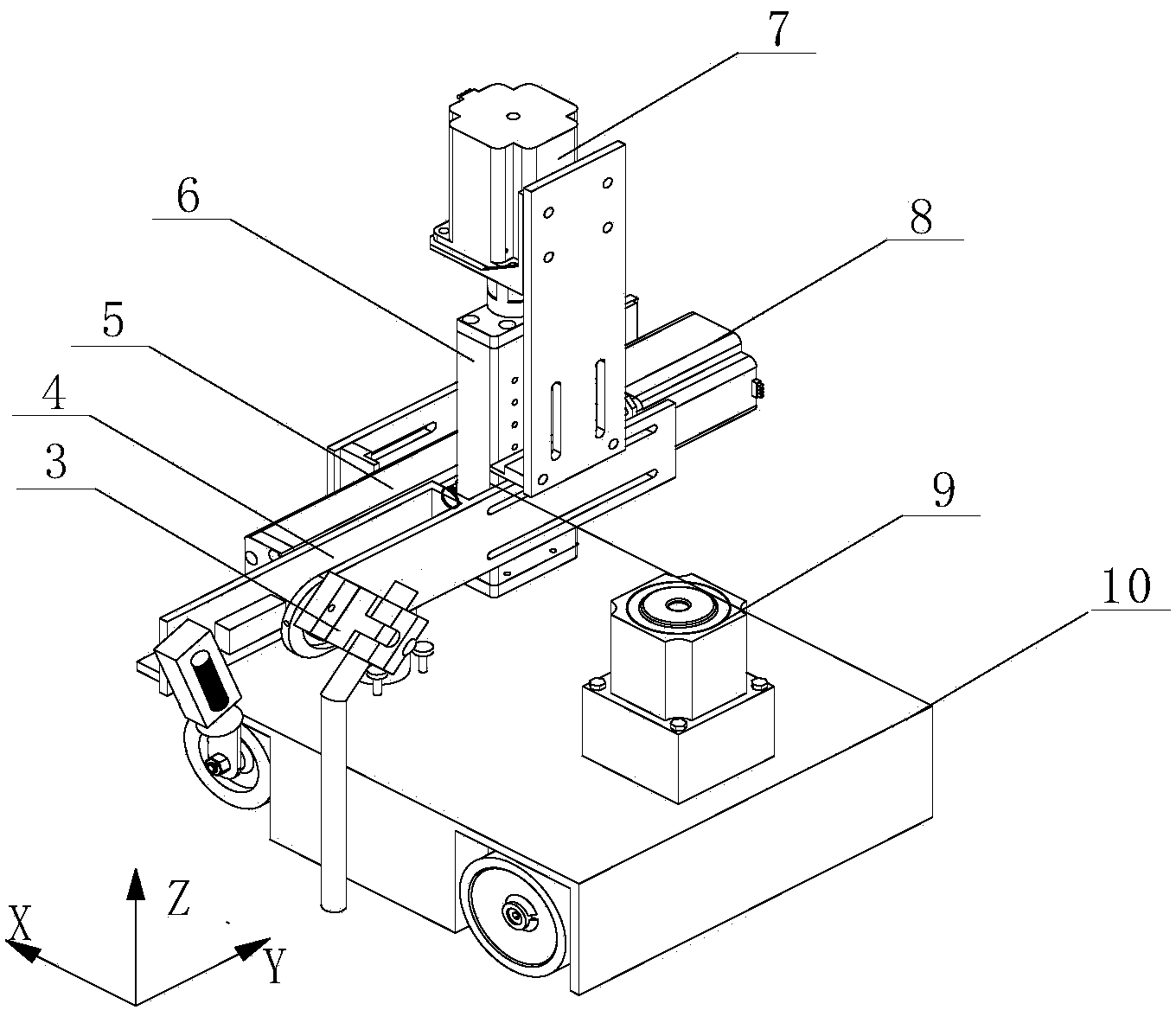
[0035] The welding robot is used to hold the welding torch and carry the sensor system, and drive the movement of the welding torch in the X, Y and Z three-dimensional directions;
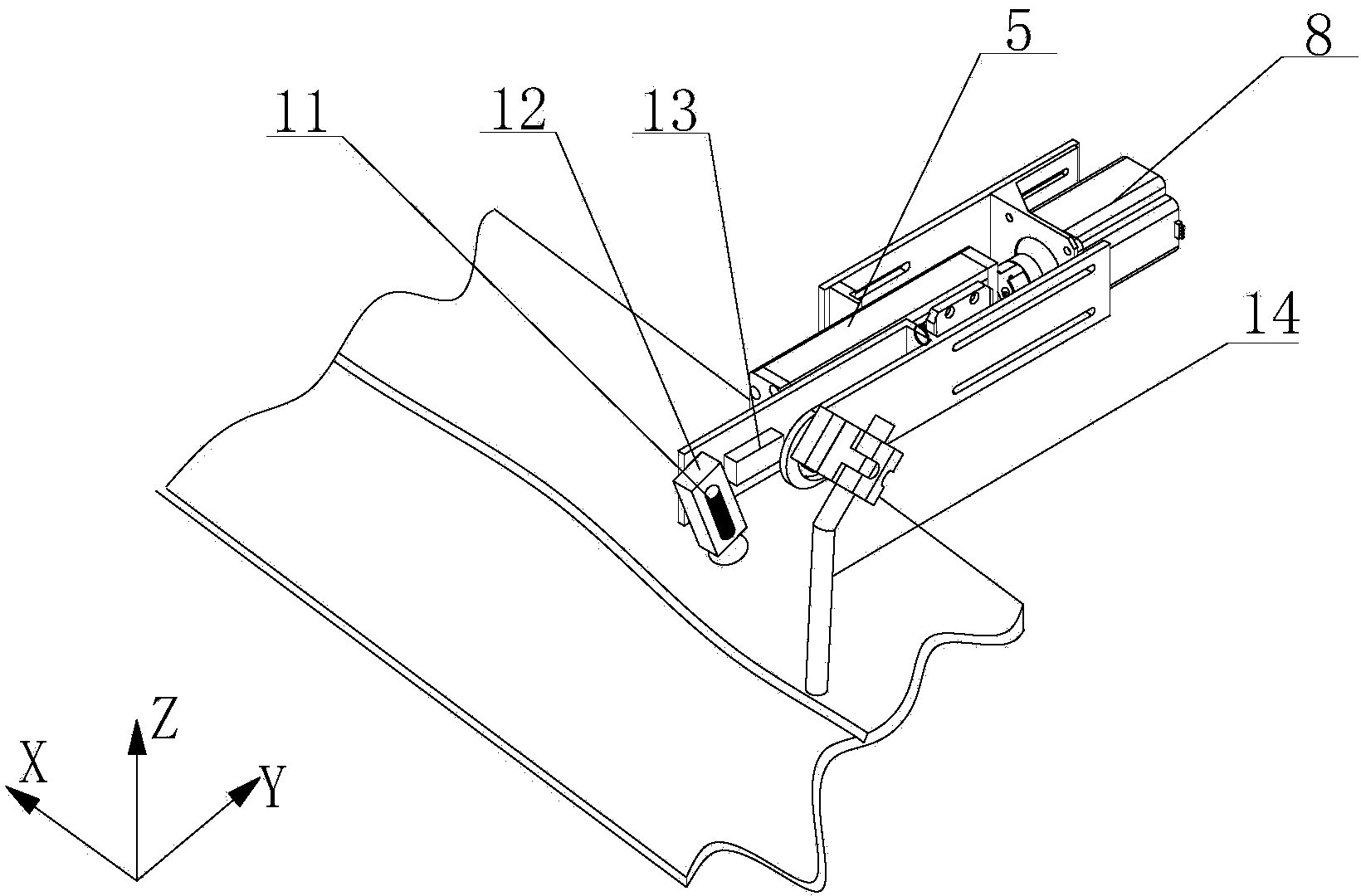
[0036] The welding seam position detection sensor system sends the position information in the Z direction, the broken line laser image and the welding scene video to the remote operation controller 2;
[0037] Remotely operate the controller, convert the position information in the Z direction into the distance value between the welding torch and the weld seam in the Z direc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More