

Method and system for assembling robot based on visual sense and force feedback control
An assembly system and robot technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of limited popularization and application, time-consuming, etc., and achieve the effect of high-precision assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
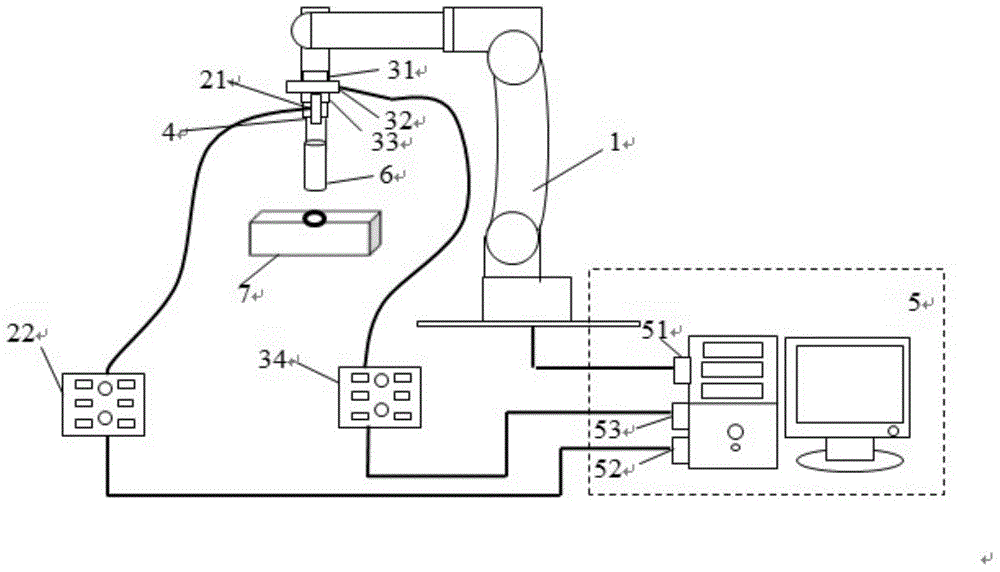
[0024] figure 1 It is a schematic structural diagram of a robot assembly system based on vision and force feedback according to an embodiment of the present invention, such as figure 1 As shown, in order to achieve the above object, the robot assembly system based on vision and force feedback of the present invention is an industrial robot assembly system capable of detecting the contour of the workpiece and adjusting the posture and motion track of the workpiece in real time. The assembly system includes an industrial robot 1, a workpiece Contour detection unit 2, assembly force detection unit 3, clamping unit 4 and system control host 5, wherein:
[0025] The end of the industrial robot 1 is connected to the assembly f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More