Series-parallel robot with five degrees of freedom
A robot and degree-of-freedom technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to meet complex working conditions, and achieve compact structure, accurate positioning, and light weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
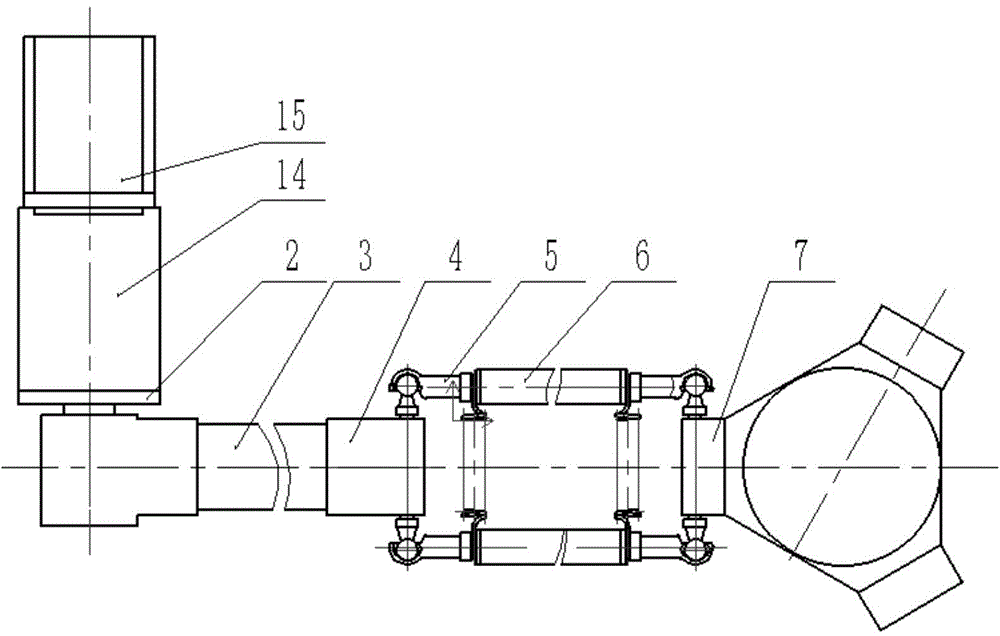
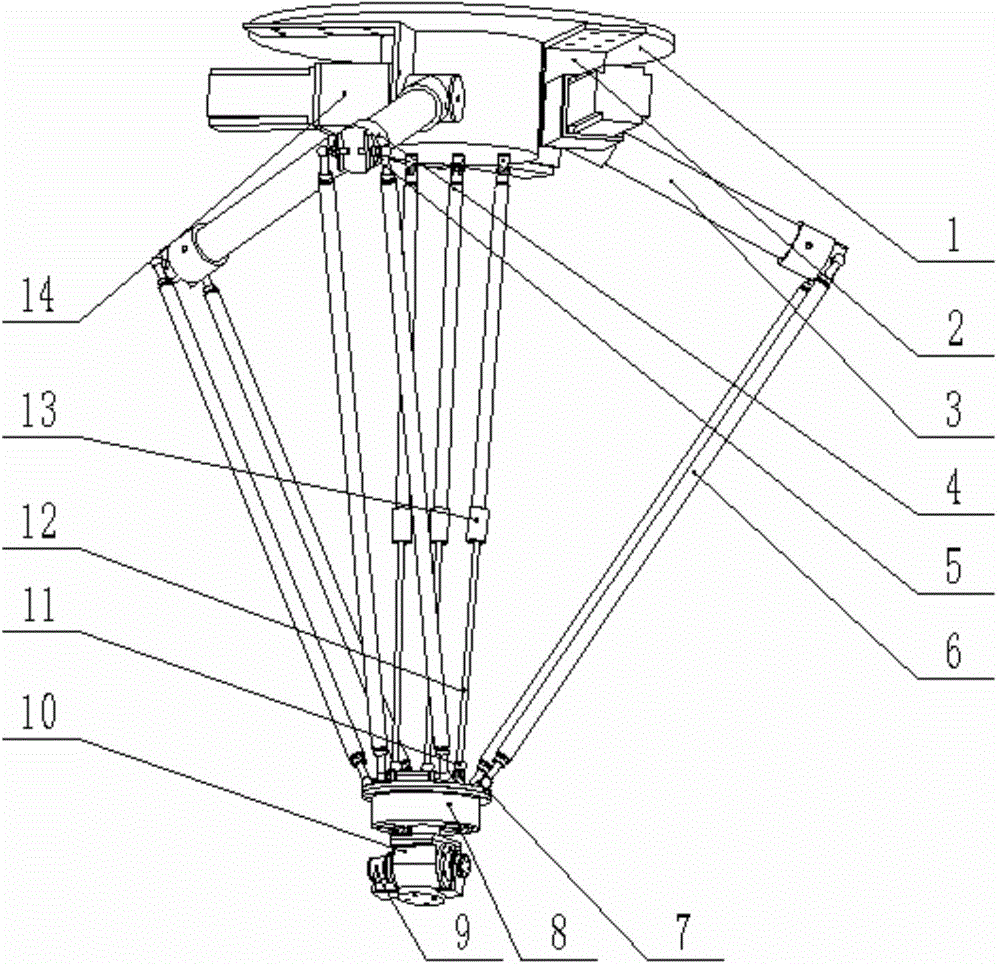
[0040] Such as figure 1 , 2 As shown, this embodiment provides a five-degree-of-freedom hybrid robot, including a power drive system, a positioning system and an orientation system, such as figure 1 Shown is a schematic diagram of the branch, such as figure 2 Shown is the overall three-dimensional schematic diagram; specifically:
[0041] The positioning system includes: a driving arm mechanism, a driven arm mechanism, and a moving platform mechanism, wherein:
[0042] Described driving arm m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More