

Teleoperation method of high-dimensional motion arm aiming at service robot
A service robot and teleoperation technology, applied in the field of service robots, can solve the problems such as the inability to guarantee the safety and collision-free of the mechanical arm, the limited application scope, and the inability to be civilized, and achieve the effect of cost reduction, extensive application value, and enhanced operability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
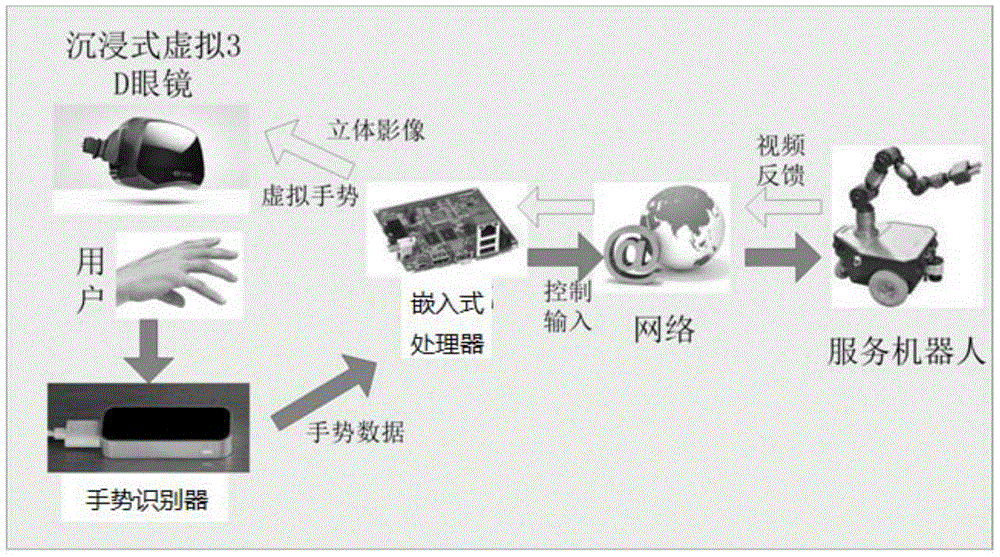
[0027] The present invention proposes a new implementation method for the remote operation of the remote service robot arm. The user does not need expensive force feedback equipment at the near end, and can remotely control the arm movement of the robot only through gestures and complete the complex environment. object grasping task. The present invention is composed of a hardware system configuration scheme, an autonomous planning method of a high-dimensional manipulator under under-input, and a system integration technology. Below we discuss these three aspects respectively:
[0028] 1. Hardware system composition: As shown in the figure, the system of the present invention is mainly composed of a gesture recognizer, immersive virtual 3D glasses, an embedded processor with a router, and a service robot.
[0029] The gesture recognizer adopts the low-cost motion capt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More