

Full-actuating type autonomous underwater vehicle cooperative control method
An underwater vehicle and collaborative control technology, applied in the field of control, can solve the problems of not being able to guarantee trajectory formation, not considering the influence of underwater ocean currents on system disturbance, and limiting engineering applications, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
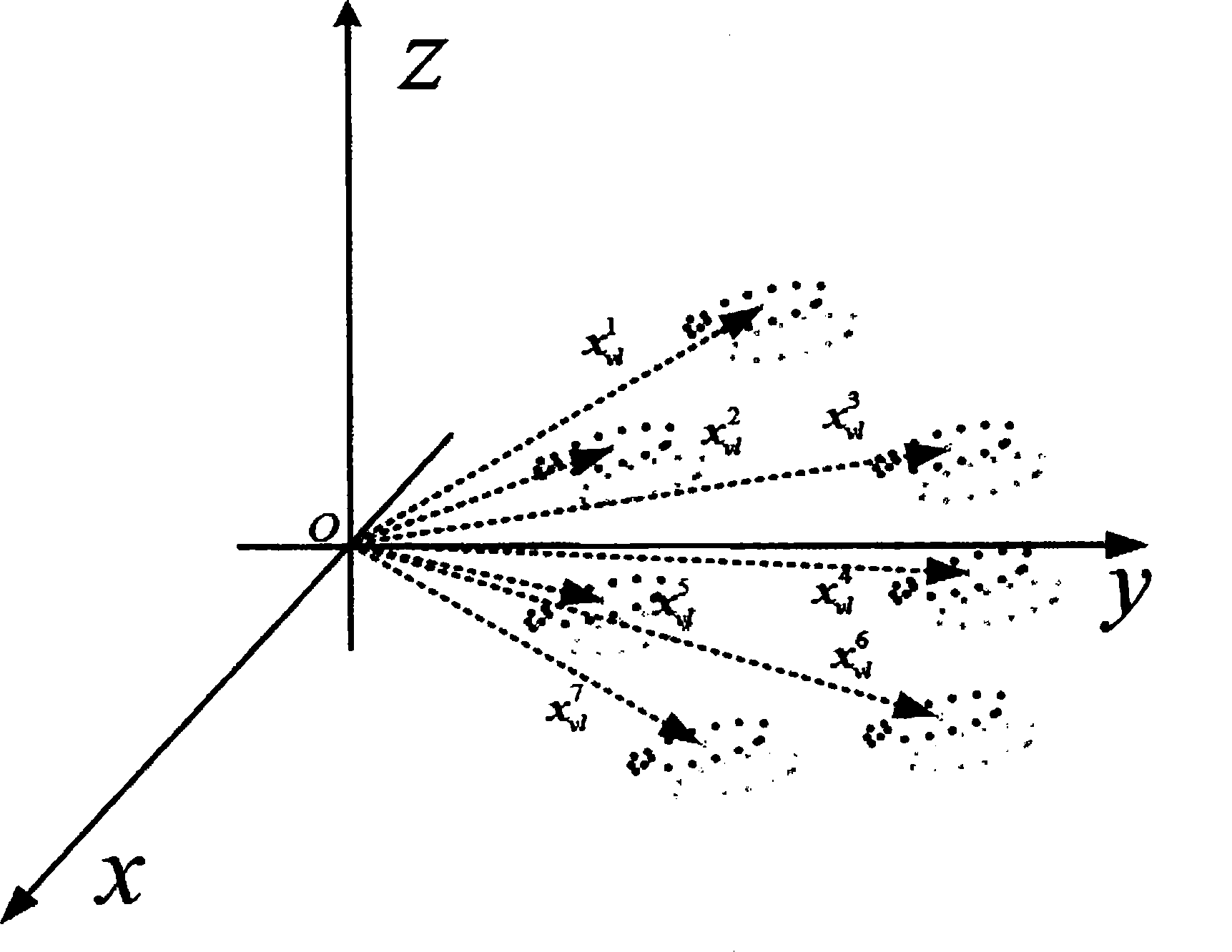
[0113] Taking the triangle formation control of seven FAAUVs as an example to illustrate the effectiveness of the cooperative control method. All FAAUVs are robots of the same type, FAAUV i quality m i =16(kg, moment of inertia I xx i = 0.27 ( kg · m 2 , I yy i = 0.27 ( kg · m 2 ) , I zz i = 0.27 ( kg · m 2 ) , product of inertia The coordinates of the center of buo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More