Automatic recognition method of surgical robot positioning landmarks
A surgical robot and automatic identification technology, applied in the field of image processing, can solve the problems of deviation of surgical path, wrong identification of marking point sequence, and reduce the accuracy of surgical robot, so as to achieve the effect of high identification accuracy and avoid identification errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described below in conjunction with the drawings.
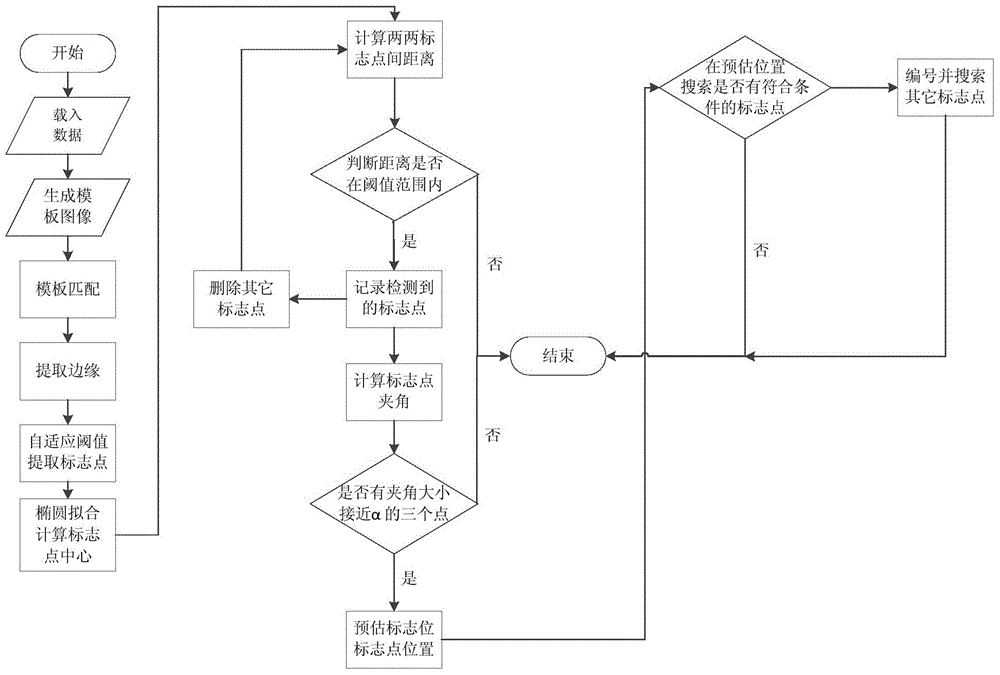
[0029] The invention relates to an automatic recognition method for positioning landmark points of a surgical robot, which is used for recognizing landmark points used for positioning in an X-ray fluoroscopy image taken by a surgical robot. The method extracts the landmark points in the X-ray fluoroscopy image after obtaining The mark points whose distance between the two mark points is within the range allowed by the first threshold; then calculate the angle of the mark points, and detect the three mark points that constitute the preset angle of the two vectors; according to the detected three The position of the mark point is estimated by using the estimation algorithm to obtain the position of the fourth mark point, and then the identified mark points are sorted and numbered.
[0030] The preferred flow chart of the method of the present invention is as follows figure 1 As shown, it specific...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More