

Cantilever manipulator structure
A technology of manipulator and cantilever, which is applied in the field of cantilever manipulator structure, can solve the problems that the three-coordinate positioning manipulator cannot meet modern production, cannot operate with manipulator, and cannot perform rotary operation, and achieves the effects of good versatility, guaranteed structural strength, and large working environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
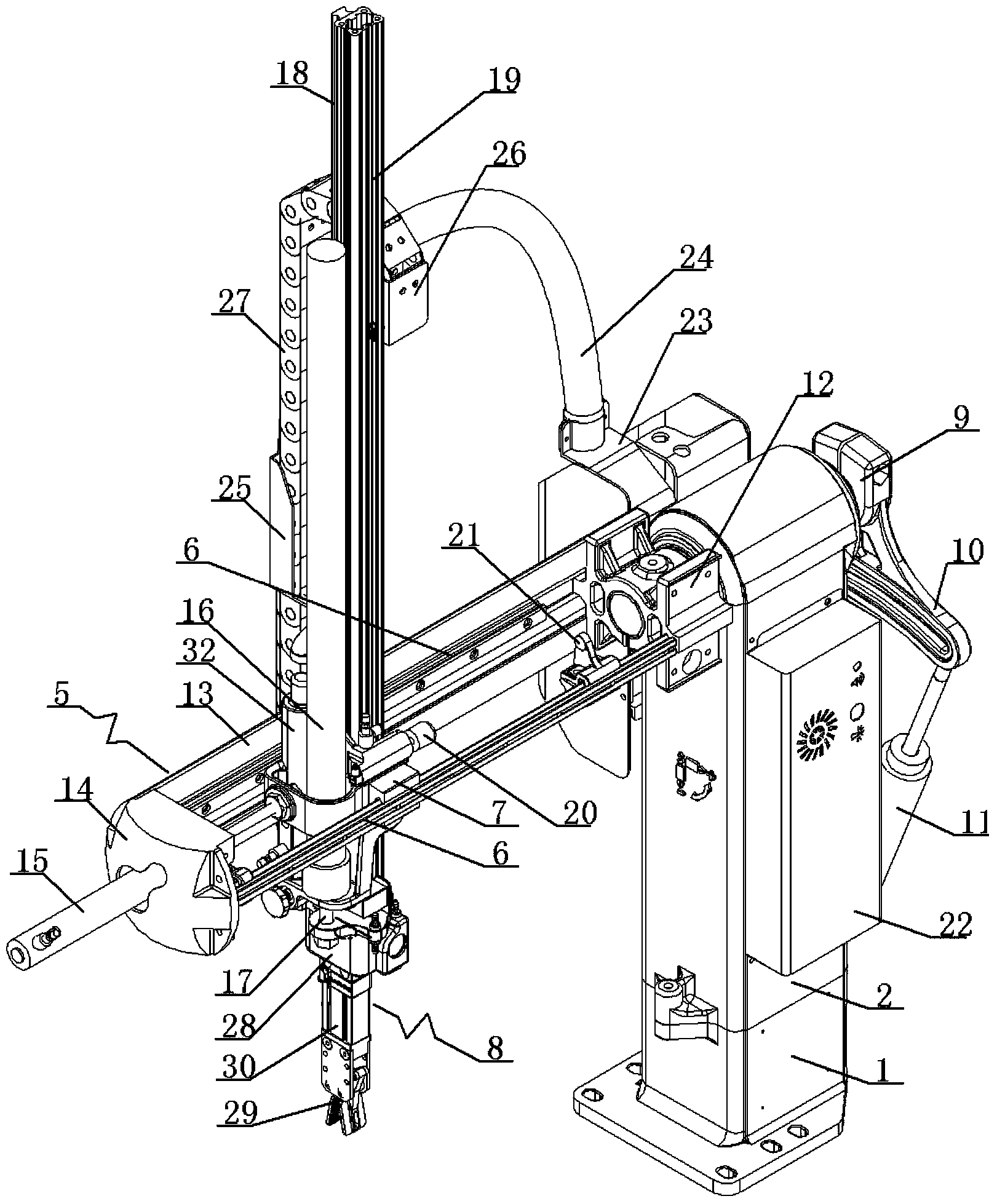
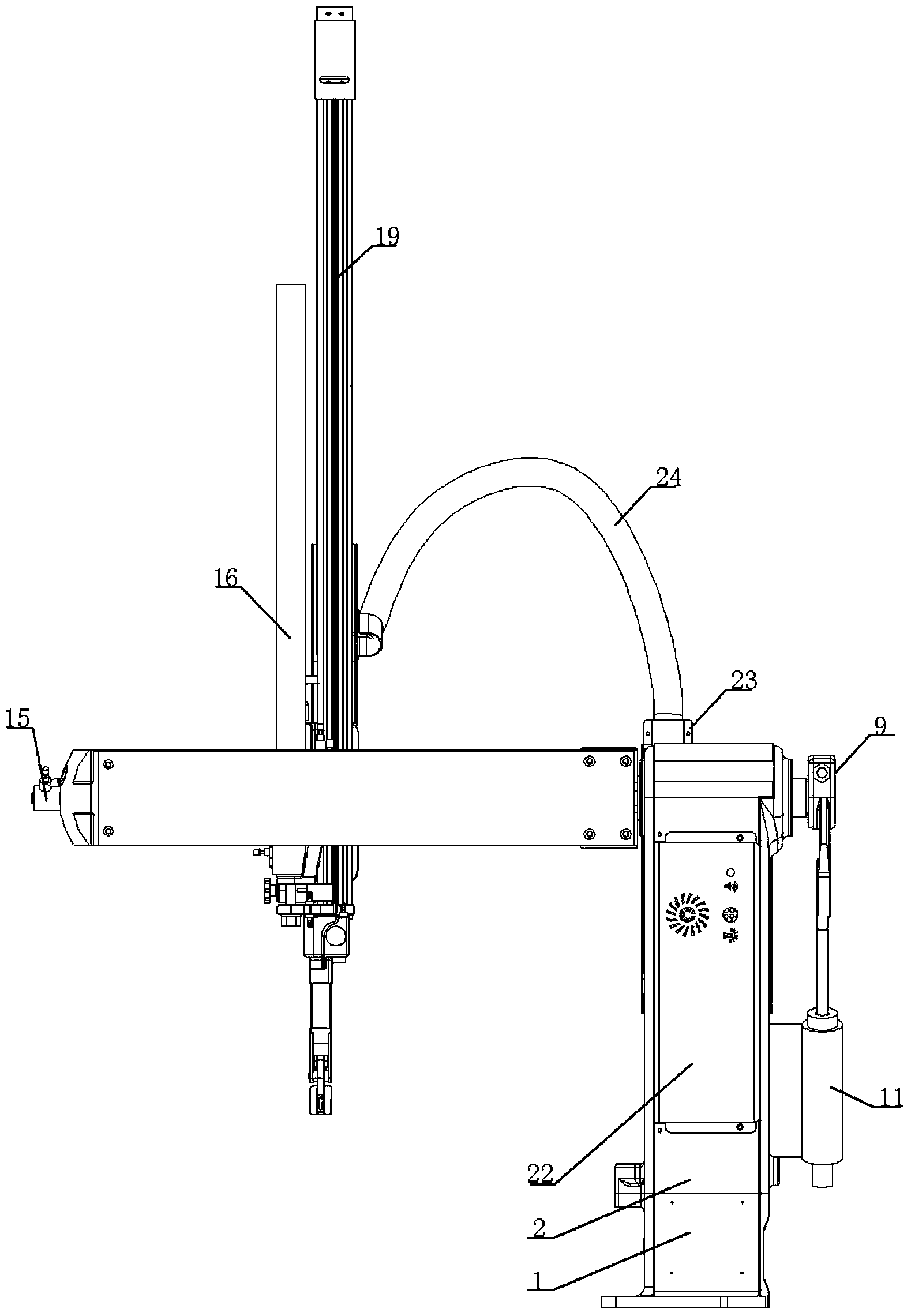
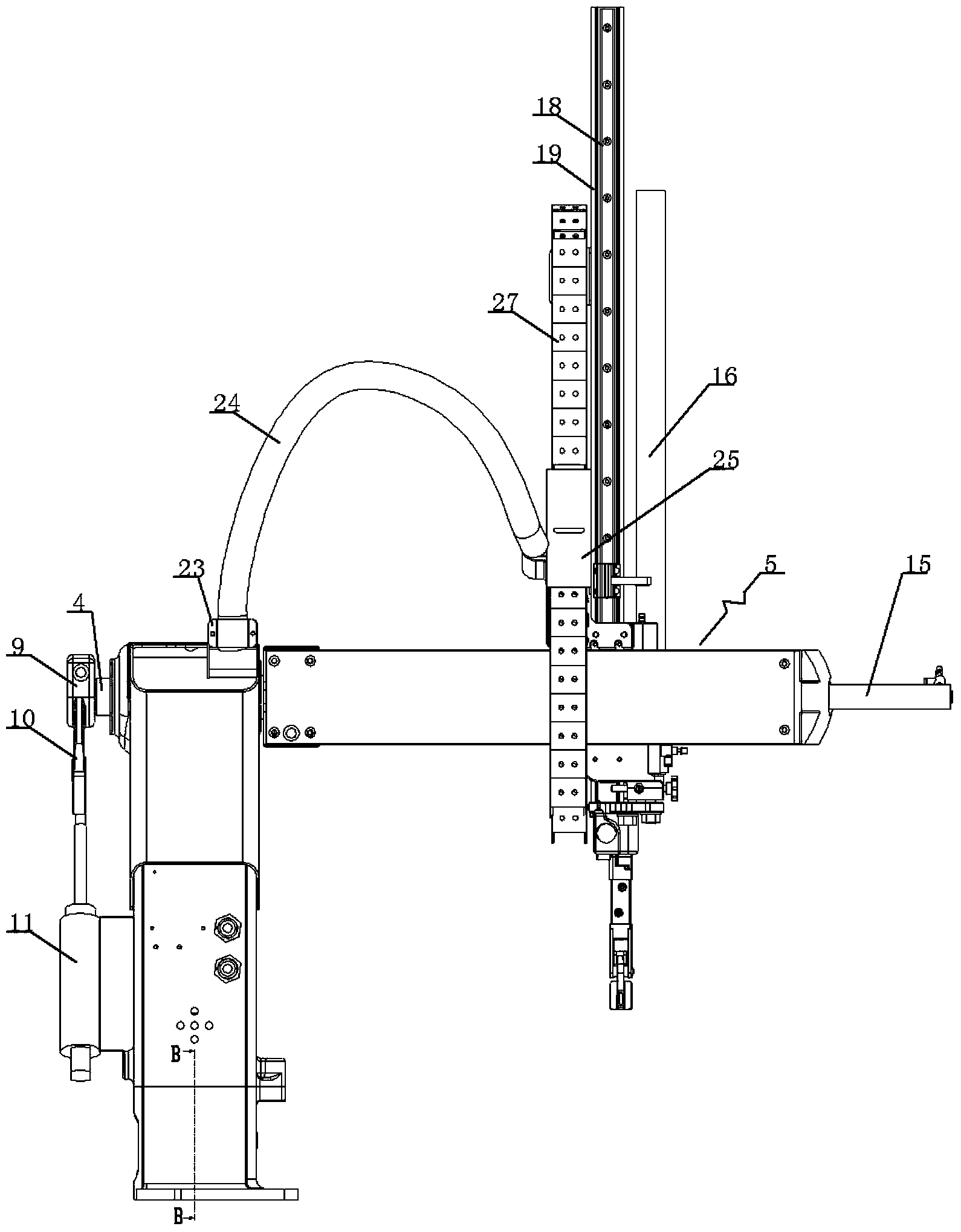
[0025] A cantilever manipulator structure, see Figure 1 to Figure 9 : It includes a base 1 and a support 2, the support 2 is supported on the base 1, a bottom rotating shaft 3 is arranged between the bottom center of the support 2 and the base, the support 2 can rotate relative to the base 1, The upper part of the support 2 is arranged with a horizontal rotating shaft 4 that runs through its front and rear ends. The horizontal rotating shaft 4 can rotate around. The structure 5 is provided with a drawing guide rail 6 parallel to the horizontal axis of rotation. The upper and lower seats 7 are clamped on the drawing guide rail 6. The upper and lower seats 7 can move linearly along the drawing guide rail 6. The upper and lower seats 7 are fastened with a linear drive. Components, the driving direction of the linear drive component is perpendicular to the upper plane of the drawing guide rail 6 , and the lower drive part of the linear drive component is fastened to the clamping ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More