

Method for autonomous measurement of pose of tripod structure of solar panel on non-cooperative spacecraft
A technology for solar panels and spacecraft, which is applied in measurement devices, integrated navigators, photogrammetry/video surveying, etc. Avoid the effect of delay and system instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
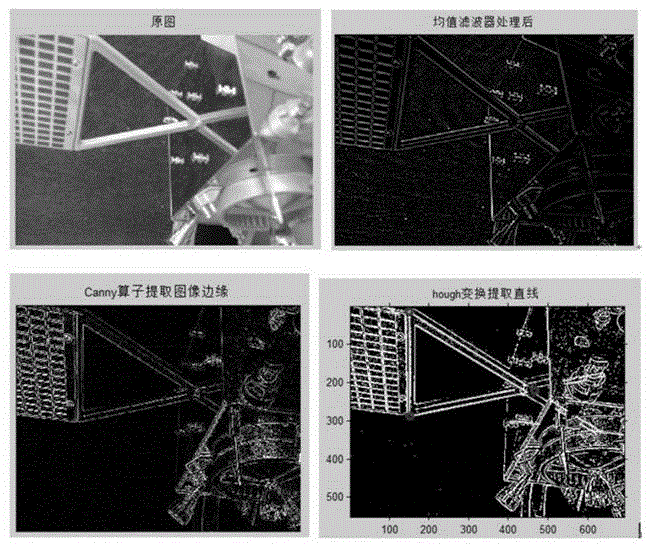
[0019] A method for autonomous measurement of the position and orientation of a tripod structure with solar panels on a non-cooperative spacecraft, image processing steps:
[0020] (1) Use the Canny operator to extract the edge of the image: use a Gaussian filter to smooth the image, then use the finite difference of the first-order partial derivative to calculate the magnitude and direction of the gradient, then suppress the gradient magnitude by non-maximum value, and finally use Double-threshold algorithm detects and connects edges;
[0021] (2) Carry out mean value filter, reduce the noise of pixel;
[0022] (3) Image binarization: that is, grayscale division, which refers to setting a grayscale value. If the grayscale of the image itself is greater than it, it will be a bright spot, and if the grayscale value is lower than the set value, it will be a bright spot. scotoma, thus obtaining a binary image.
[0023] A method for autonomous measurement of the position and ori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More