

Exoskeleton robot system with human motion detecting function and control method of robot system
An exoskeleton robot and human body movement technology, applied in sports accessories, gymnastics equipment, prostheses, etc., can solve problems such as poor applicability, difficult to achieve power-assisted effects on complex road surfaces, and inability to correctly judge human movement intentions, etc., to ensure comfort, Improve the diversity of human motion and the effect of complex road surfaces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
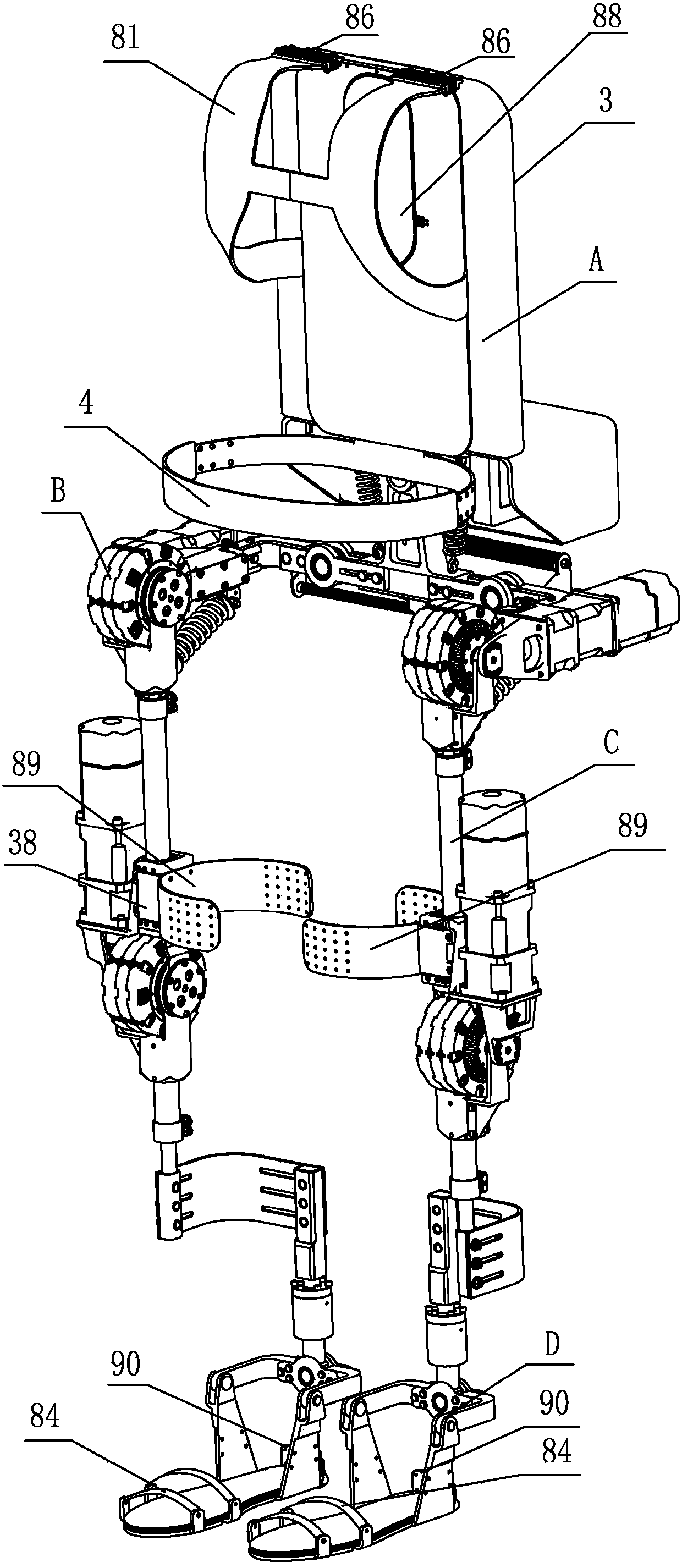
[0028] Specific implementation mode one: combine Figure 1-Figure 11 with Figure 16 Explain that the exoskeleton robot system with human body motion detection function in this embodiment includes upper body back A, left leg and right leg, and left leg and right leg respectively include hip driving system B, thigh driving system C and calf wearing system D The upper body back A includes the back brace 3; each thigh drive system C includes the knee gear box 38; each calf wear system D includes the shoe sole 72;
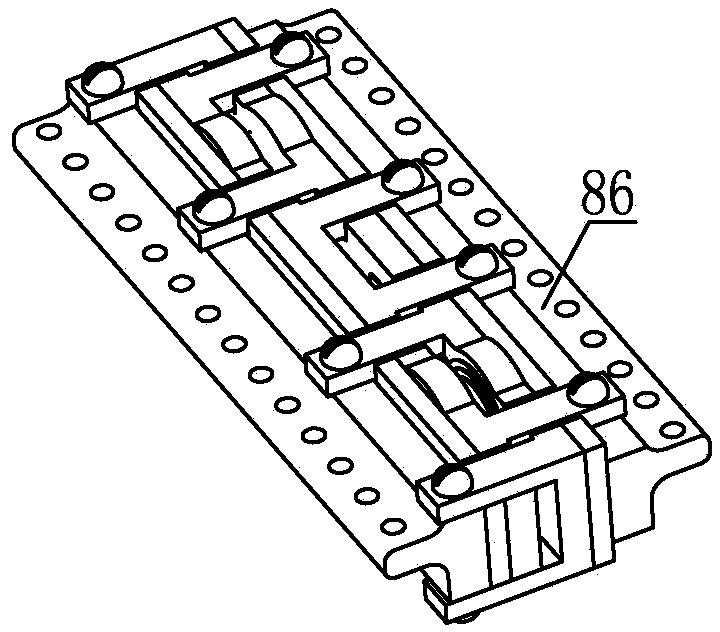
[0029] Upper body back A also includes shoulder strap 81, and each thigh driving system C also includes thigh strap 89, and each calf wearing system D also includes foot strap 84, upper rubber pad 83, lower rubber pad 87, heel plate 91 , the exoskeleton robot system also includes a sensor detection control system;
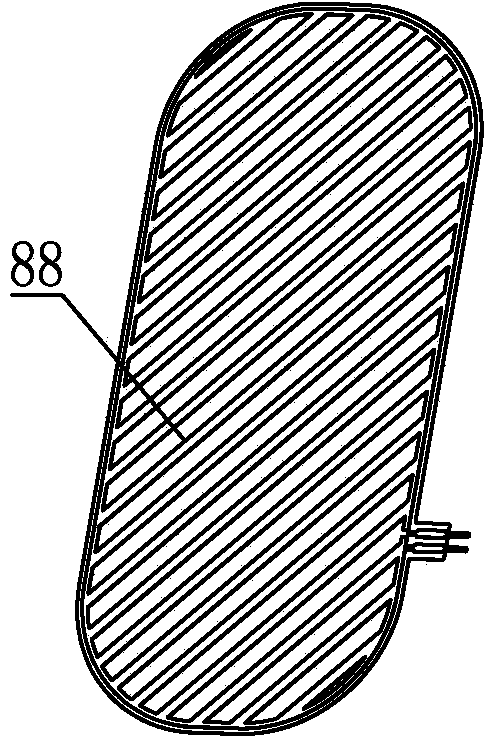
[0030] Described sensing detection control system comprises industrial control computer, back film pressure sensor 88, two heel film pressure sensors 90,...
specific Embodiment approach 2
[0038] Specific implementation mode two: combination Figure 11 To illustrate, the two heel film pressure sensors 90 described in this embodiment are strain gauge type film pressure sensors. With such arrangement, the structure is simple, the use is convenient, and the actual needs are met. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0039] Specific implementation mode three: combination Figure 9 Note that the thickness of the upper rubber pad 83 and the lower rubber pad 87 in this embodiment is both 2 mm. With such arrangement, the lower rubber pad and the upper rubber pad protect and buffer the sole film pressure sensor, and are of moderate size and convenient to use. Others are the same as in the first or second embodiment.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More