

Sea wave sensing based water unmanned plane autonomous taking-off and landing control system
An unmanned aerial vehicle and ocean wave technology, applied in the field of flight control, can solve the problem that the unmanned aerial vehicle cannot be directly used in water, and achieve the effect of improving the surface operation ability, wave resistance ability and safety improvement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
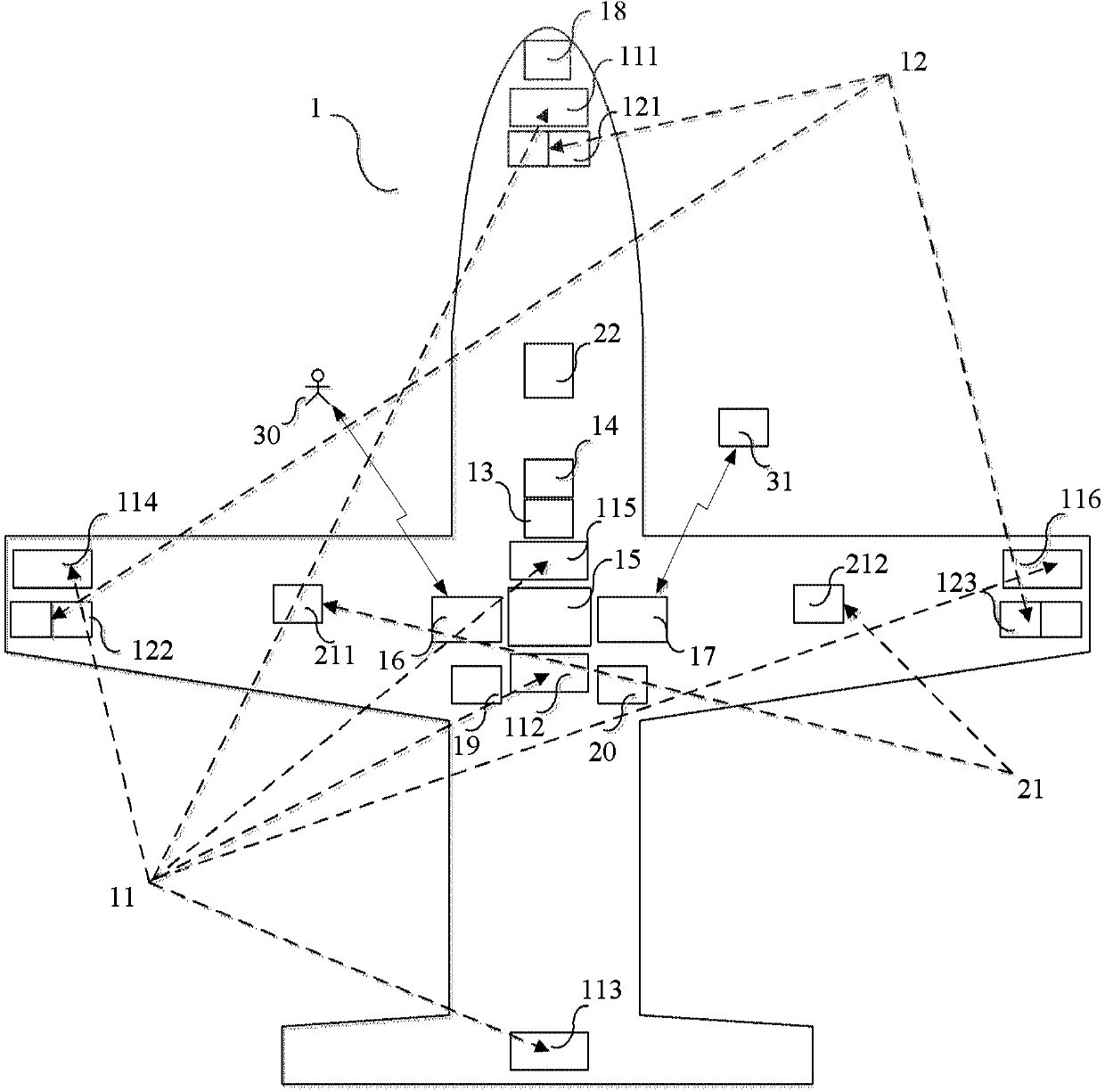
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings. In order to describe the present invention more clearly, at first each element in the accompanying drawing is numbered:
[0026] 1 - Aquatic UAV;
[0027] 11-distributed accelerometer; 12-radar altimeter; 13-gyroscope; 14-GPS module; 15-autopilot; 16-receiver; 17-digital radio; 18-engine and propeller; 19-pitch rudder 20-direction steering gear; 21-rolling steering gear; 22-power supply module.
[0028] 111, 112, 113, 114, 115, 116-6 accelerometers installed in different positions;
[0029] 121, 122, 123-3 groups of radar altimeters installed in different positions;
[0030] 211, 212 - 2 roll servos installed on both sides of the wing;
[0031] 30 - remote control device;
[0032] 31 - Ground control station.
[0033]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More