

Partition based multi-police-intelligent-agent task allocation method in RCRSS (Robo Cup Rescue Simulation System)
A technology of task allocation and intelligent body, applied in the direction of instruments, data processing applications, resources, etc., can solve the problems of inability to traverse the map, waste of police resources, etc., to achieve the effect of improving rescue efficiency, improving efficiency, and satisfying dynamicity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
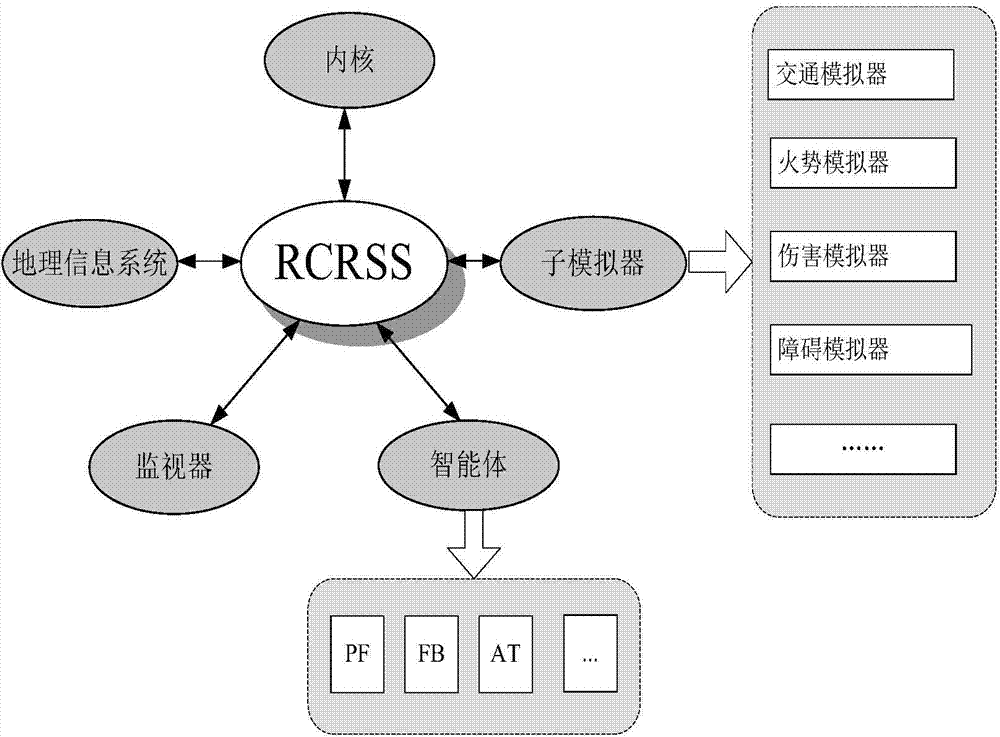
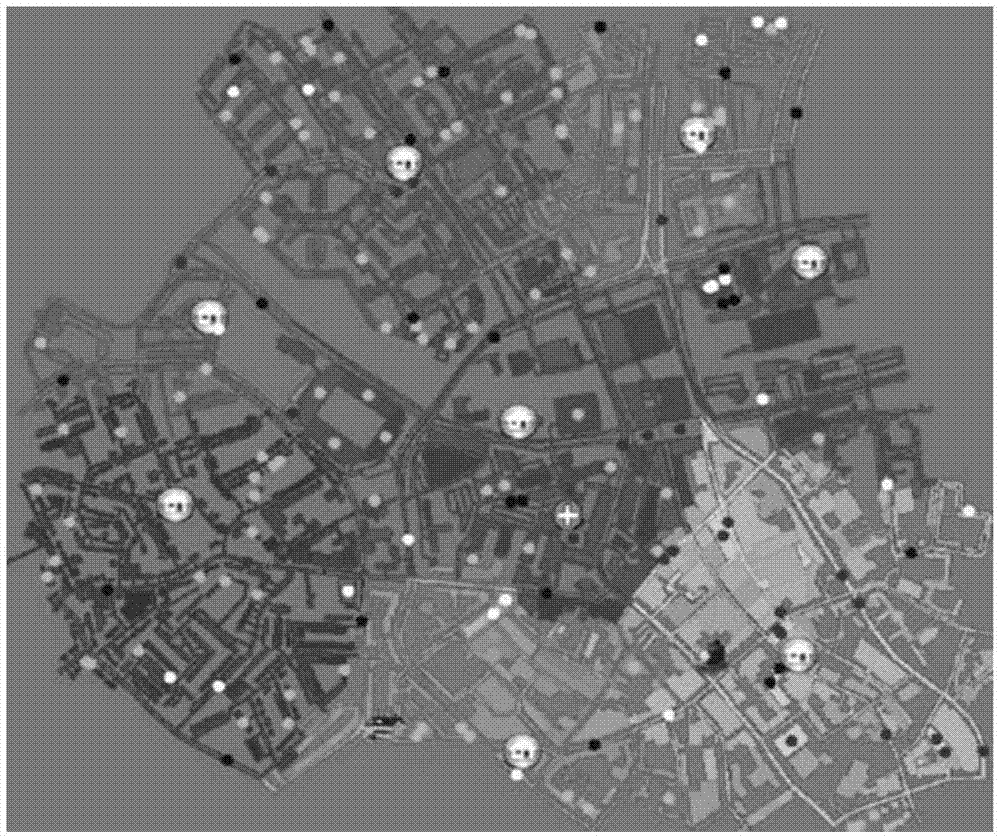
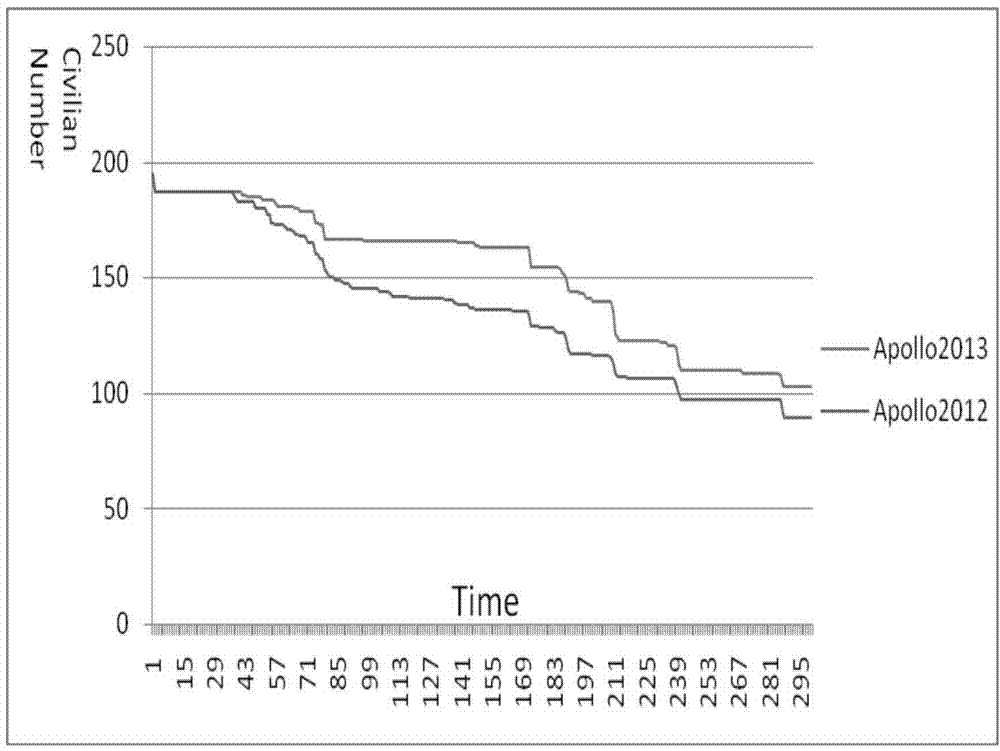
[0051] RCRSS (RoboCupRescue Simulation System, RCRSS) is a typical multi-agent system. In order to effectively solve the task assignment problem of multi-police agents, the embodiment proposes a partition-based multi-police agent task assignment method in RCRSS. Embodiment By studying the multi-agent cooperation problem in a complex dynamic environment, combined with a large number of simulation experiments, a task assignment mechanism based on partitions is proposed to realize the task assignment of multi-police agents. The mechanism first divides the map into different For partitions with more than the number of police officers, a certain number of police officers are assigned to each partition. The policemen in the partitions generally only perform tasks within the partition, and the rest of the police are as dynamic police officers waiting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More