

A Method for Estimating Normal Vectors of 3D Point Clouds
A three-dimensional point cloud and normal vector technology, applied in the field of parameter calculation, can solve the problems of noise sensitivity, easy to introduce large errors, etc., to achieve stable results, improve the suppression ability, and improve the visual display effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
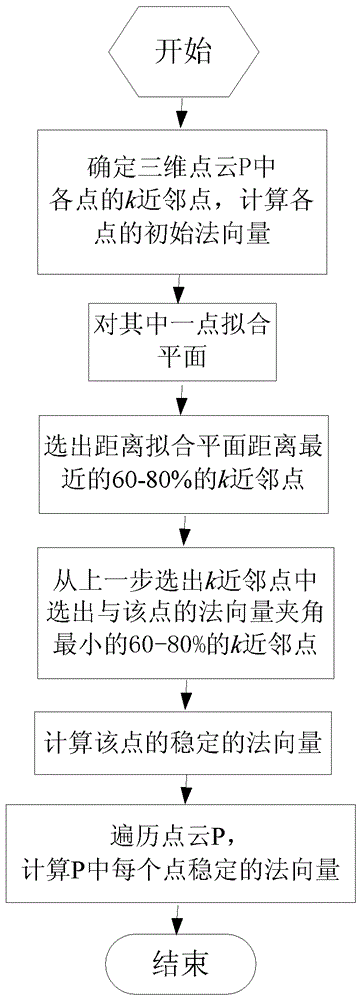
[0047] combine figure 1 , use the 3D point cloud point normal vector estimation method of the present invention to calculate the stable normal vector of the point on the plane, comprising the following steps:
[0048] Step 1. Set the point set of a 3D point cloud as P, the number of points in P is 600, and take a point p in P i (x i ,y i ,z i )(p i ∈P∈R 3 ), 1≤i≤600, determine p in the spatial neighborhood i The k-nearest neighbors, where k=30, determine p according to the k-nearest neighbors i The initial normal vector of ; traverse point cloud P, determine the initial normal vector of each point in P; specifically include the following steps:
[0049] Step 1-1, set p i The set of k nearest neighbors is N pi ;
[0050] Step 1-2, define p i The coordinate covariance matrix of is
[0051]
[0052] C is a 3×3 symmetric positive semi-definite matrix, calculate the 3 eigenvalues of C and arrange them in descending order so that λ 2 ≥λ 1 ≥λ 0 , the three eigenva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More