

A dual-powered quadruped robot for walking on slopes
A quadruped robot, dual-power technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of poor walking ability of quadruped robots, affecting the accuracy of leg movement, complex mechanical structure, etc., to reduce the number of stepping motors , To ensure smoothness and stability, the effect of simple transmission mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
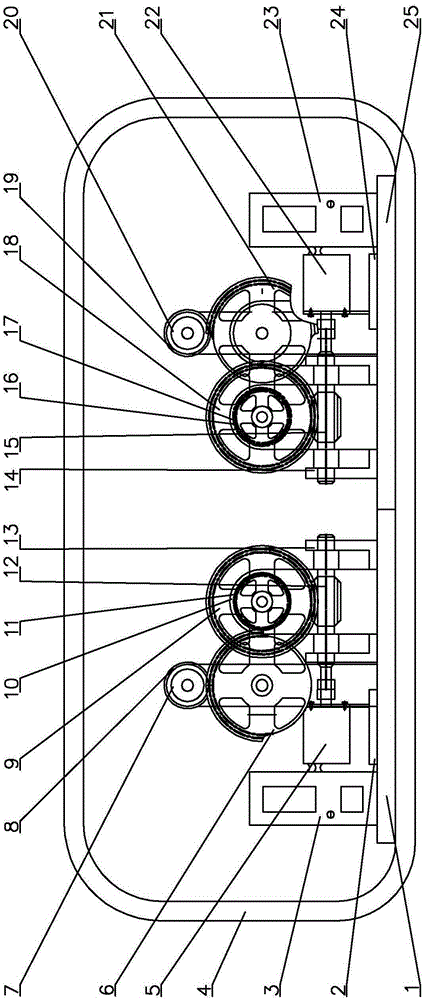
[0007] Specific implementation mode one: combine Figure 1-Figure 3 Describe this embodiment, a dual-power quadruped robot for walking on slopes described in this embodiment, the robot includes a casing 4, a first support chassis 1, a second support chassis 25, a first power control system 3 , the second power control system 23, the first power transmission mechanism 72, the second power transmission mechanism 73, the first leg actuator 74, the second leg actuator 75, the third leg actuator 76, the fourth leg Executing mechanism 77, the first stepping motor 5, the second stepping motor 22, the first stepping motor support 2 and the second stepping motor support 24, the casing 4 is a rectangular shell with an open bottom, the first stepping motor The motor 5 is fixedly installed on the first stepper motor bracket 2, the second stepper motor 22 is fixedly installed on the second stepper motor bracket 24, and the first support chassis 1 and the second support chassis 25 are fixed...
specific Embodiment approach 2
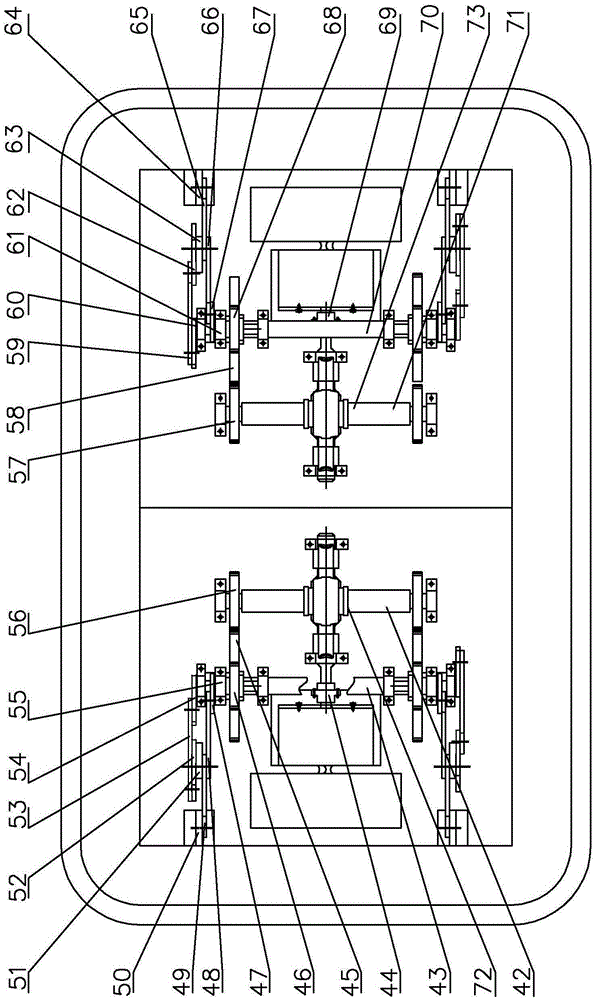
[0008] Specific implementation mode two: combination figure 1 and image 3 Describe this embodiment, a dual-power quadruped robot for walking on slopes described in this embodiment, the first power transmission mechanism 72 includes a first coupling 44, a first worm 12, a first worm wheel 9, The first main transmission gear shaft 42, the first driven shaft 43, the first semicircular gear 6, the second semicircular gear 45, the first gear support frame 7, the first leg drive gear 8, the second leg drive Gear 46, first worm support 13, first driving wheel gear shaft support 10, first transmission gear 11, second transmission gear 56 and two first rotating shafts 55, second power transmission mechanism 73 includes second coupling 69 , the second worm 15, the second worm gear 18, the second driven shaft 70, the second main transmission gear shaft 71, the third semicircular gear 21, the fourth semicircular gear 58, the second gear support frame 20, the third Leg driving gear 19, ...
specific Embodiment approach 3
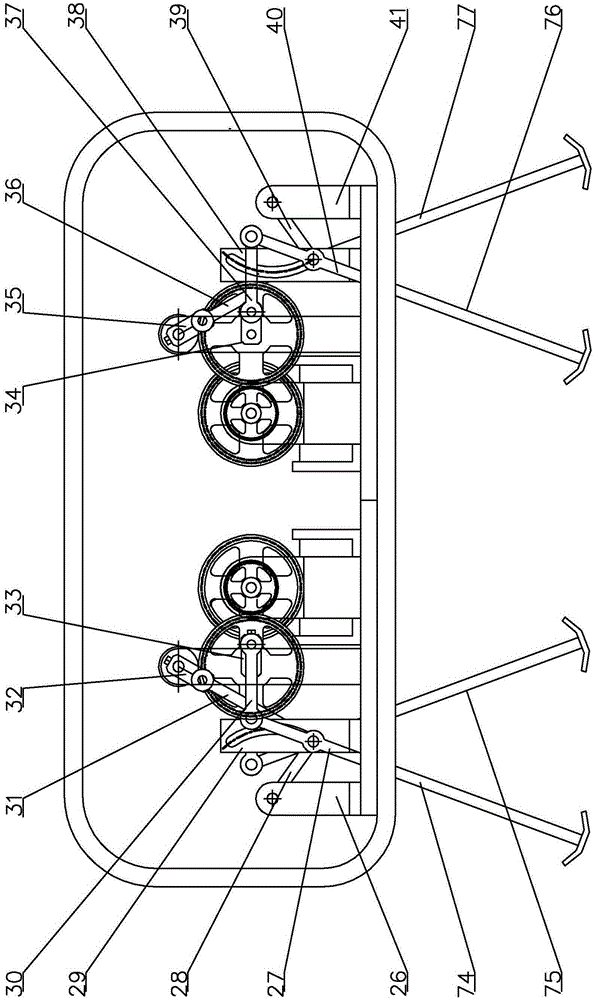
[0009] Specific implementation mode three: combination Figure 1-Figure 2Describe this embodiment, a dual-power quadruped robot for walking on slopes in this embodiment, the first leg actuator 74 includes a first rocker seat 26, a first leg rod 27, a first rocker Rod 28, the first walking track plate 29, the first leg swing link 30, the first leg lift link 31, the first leg lift crank 32 and the first leg swing crank 33, the second leg actuator 75 includes a second Rocking bar base 50, second leg bar 52, second rocking bar 49, second walking track plate 51, second swing leg link 53, second leg lift link 48, second leg lift crank 47 and second swing The leg crank 54, the third leg actuator 76 includes the third rocker seat 41, the third leg bar 40, the third rocker 39, the third walking track plate 38, the third leg swing link 37, the third leg lifter Connecting rod 36, the 3rd leg lifting crank 35 and the 3rd swinging leg crank 34, the 4th leg actuator 77 comprises the 4th ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More