

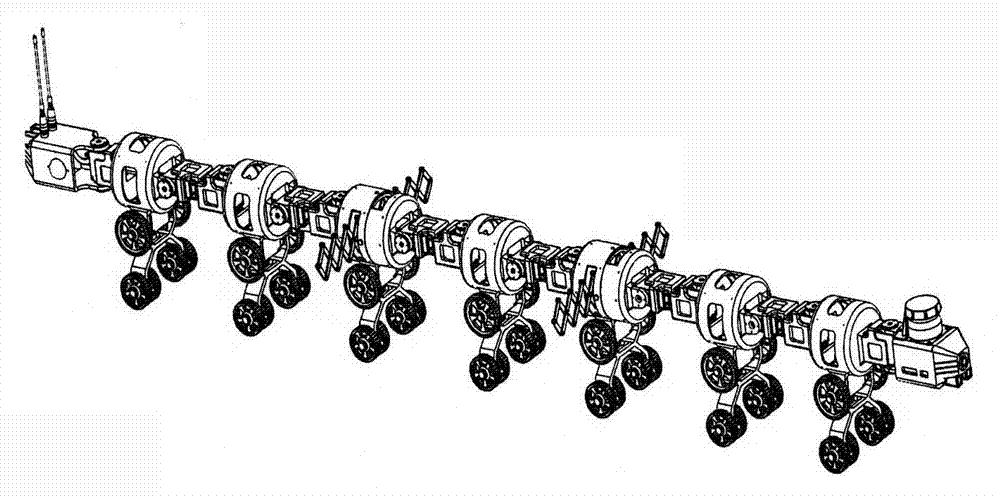
Laser range finder-based map establishing method of snake-like robot
A laser rangefinder and snake-like robot technology, applied in navigation computing tools, etc., can solve problems such as a large number of codes and consume a lot of energy, and achieve the effect of simple algorithm, reduced algorithm complexity, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
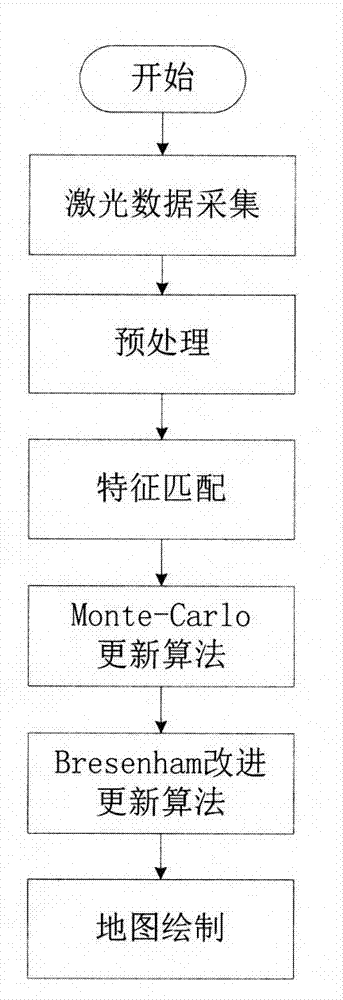
[0031] The invention relates to a method for creating a map of a snake-shaped robot based on a laser rangefinder, which specifically includes the following steps:
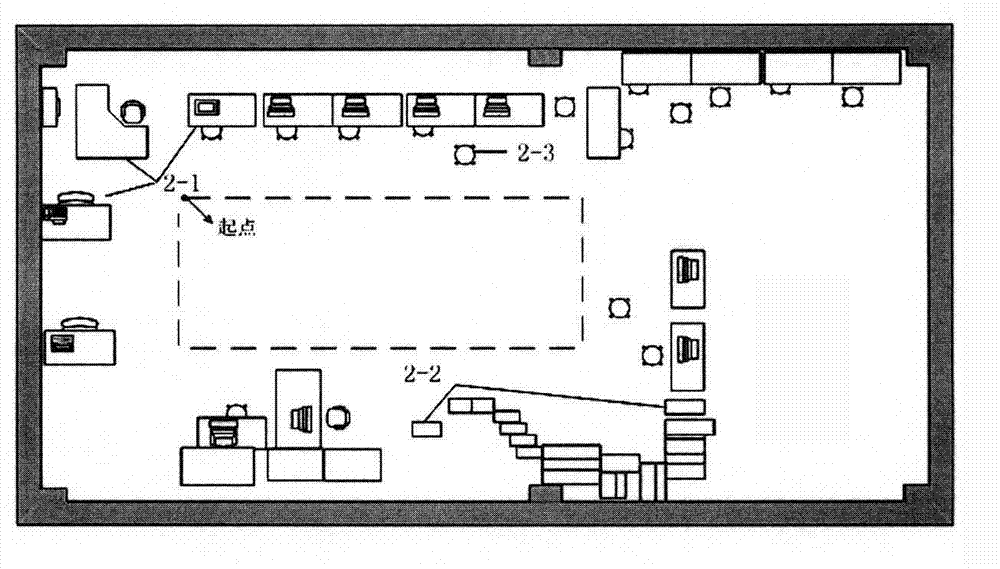
[0032] (1) Environmental awareness. The laser rangefinder is used to sense the environment and obtain environmental information.
[0033] Turn on the laser rangefinder, and control the snake-like robot to move around in a clockwise direction figure 2 The dotted track in the circle moves around for environment perception. in, figure 2 Among them, 2-1 is the experiment table, 2-2 is the box on the ground, and 2-3 is the stool.
[0034] URG04-LX laser rangefinder has a range of 20mm to 4000mm, an accuracy of 5mm within 1 meter, and an accuracy of 1% of the distance measured outside 1 meter. The maximum scanning angle is 240 degrees, the angular resolution is 0.36 degrees, and the scanning period is 100ms. RS232 or USB communication . ①Its maximum measurement distance is limited to 4m. In a cluttered environment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More