

Capacitive slide tactile sensor
A sensor device, capacitive technology, applied in the field of sensors, can solve problems such as tactile and slip information perception, achieve high resolution and improve sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
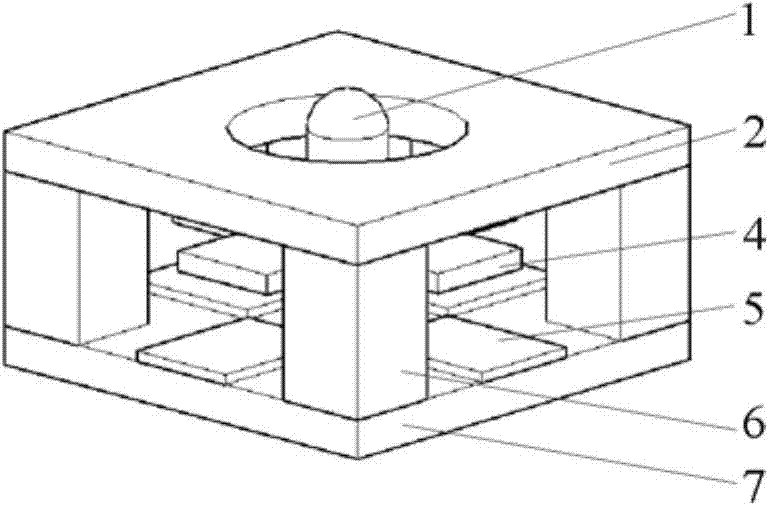
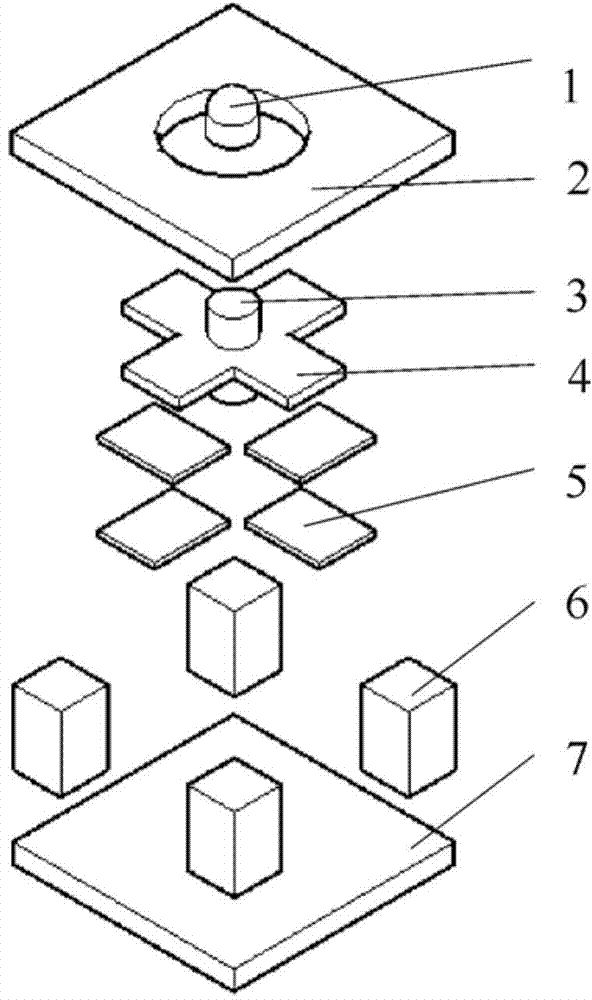
[0042] Such as figure 1 and figure 2 As shown, the structure of the capacitive sliding sensor in this embodiment is as follows: a flexible substrate 7 and a flexible upper substrate 2 positioned directly above the flexible substrate 7 and parallel to the flexible substrate 7 form the frame of the sensor device, and the flexible substrate 7 It is supported by a rectangular column 6 with the flexible upper substrate 2; a through hole is provided in the center of the flexible upper substrate 2;
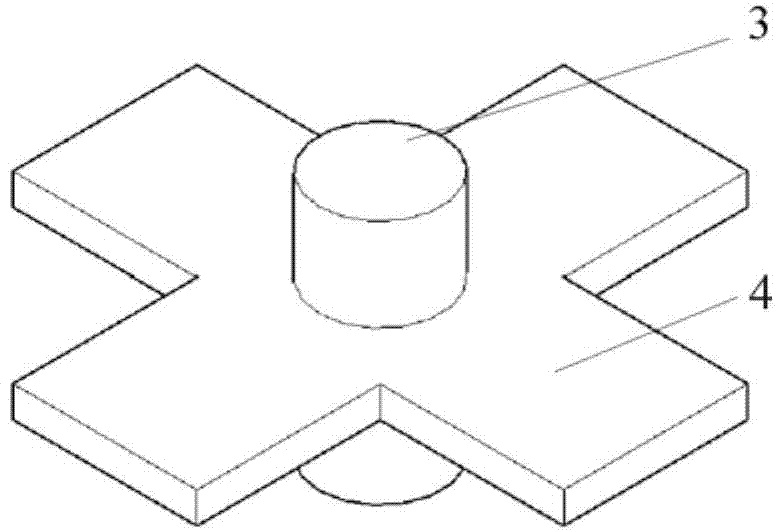
[0043] On the upper surface of the flexible base 7, there are four rectangular flexible sensing plates 5 that are not in contact with each other arranged in a cross, and a cross-shaped flexible common plate 4 is arranged at intervals directly above the four flexible sensing plates 5. , the four protruding ends of the flexible common pole plate 4 respectively form a parallel plate capacitive sensor with the corresponding flexible sensing pole plate 5 located below it;
[0044] A cylind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More