

Rescue robot three-dimensional environment map real-time construction method
A technology for rescue robots and environmental maps, applied in instruments, 3D modeling, image data processing, etc., can solve problems such as large time complexity, poor matching effect of feature points, and affecting the convergence result of ICP algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
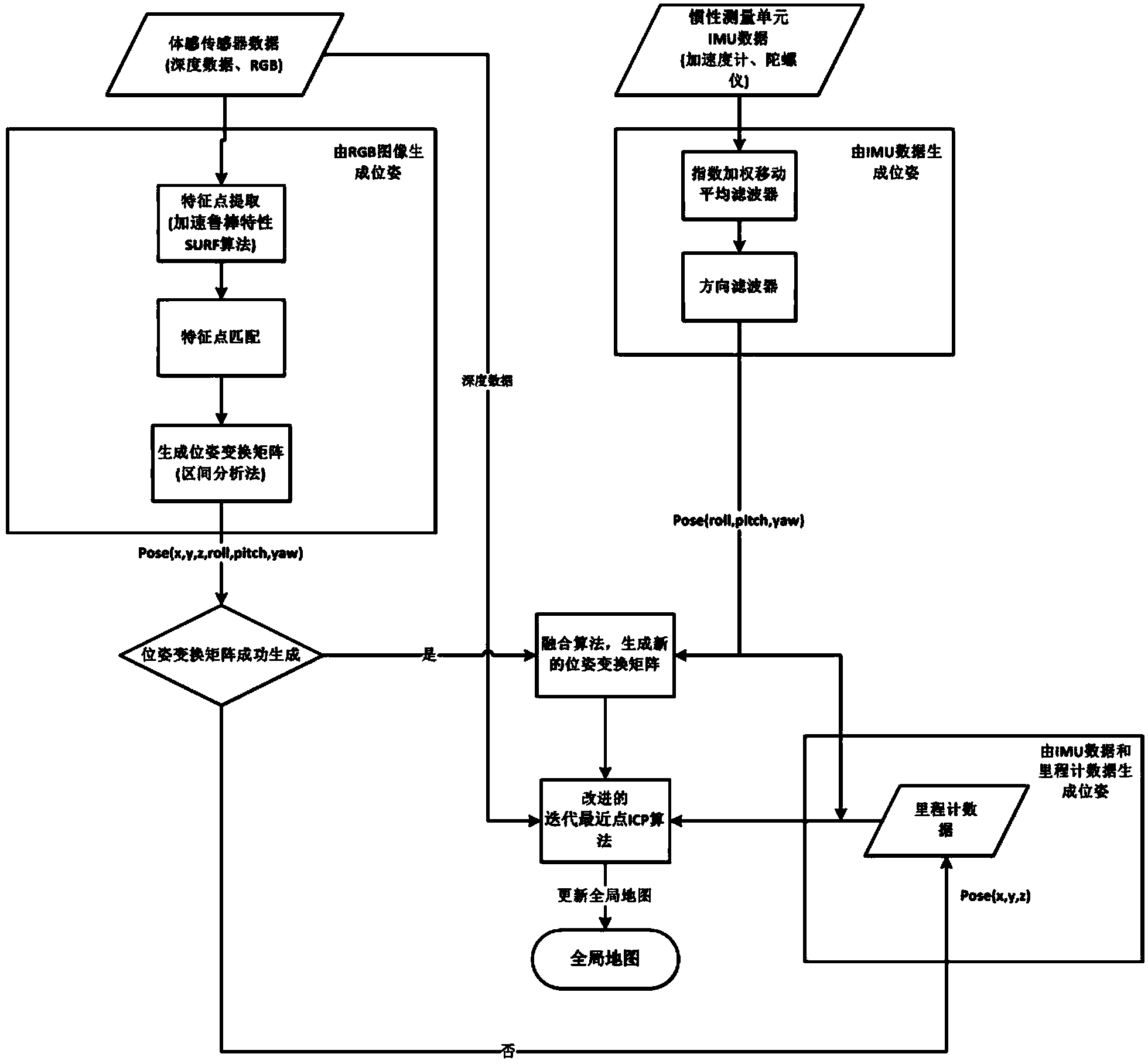
[0045] Such as figure 1 Shown is a flow chart of the method for constructing a three-dimensional environment map of the present invention.
[0046] Step 1: Obtain the RGB image from the somatosensory sensor of the rescue robot, use the accelerated robust feature (SURF) algorithm to extract the feature points of the RGB images of the two cycles before and after and extract the matching feature point pair p(X, Y, Z) and p(X,Y,Z).
[0047] The SURF algorithm introduces scale-invariant features, that is, each detected feature point is accompanied by a corresponding size factor. Compared with the SIFT algorithm, the SURF algorithm is relatively stable and has more detection feature points, but the complexity is higher, while the SURF algorithm is simpler, more efficient, and shorter in operation time. Therefore, the SURF algorithm is an enhanced version of the SIFT algorithm. High efficiency and better robustness at the same time.
[0048] Accelerated robust characteristic SURF ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More