

Air-ground amphibious spherical metamorphic robot based on metamorphic principle
A technology for robots and quadruped robots, applied in motor vehicles, convertible vehicles, transportation and packaging, etc., can solve the problems of environmental impact, limited land form of robots, etc., and achieve light weight, simple structure, and guaranteed reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] 6 is a schematic diagram of the parallelogram mechanism of the land-air amphibious spherical metamorphic robot. It mainly includes crank, connecting rod and support arm. The crank is connected by a short steel shaft (16) to the upper crank plate (12), the middle crank plate (13), and the lower crank plate (14), and uses a short sleeve (15) to position the connecting rod-1 (11).
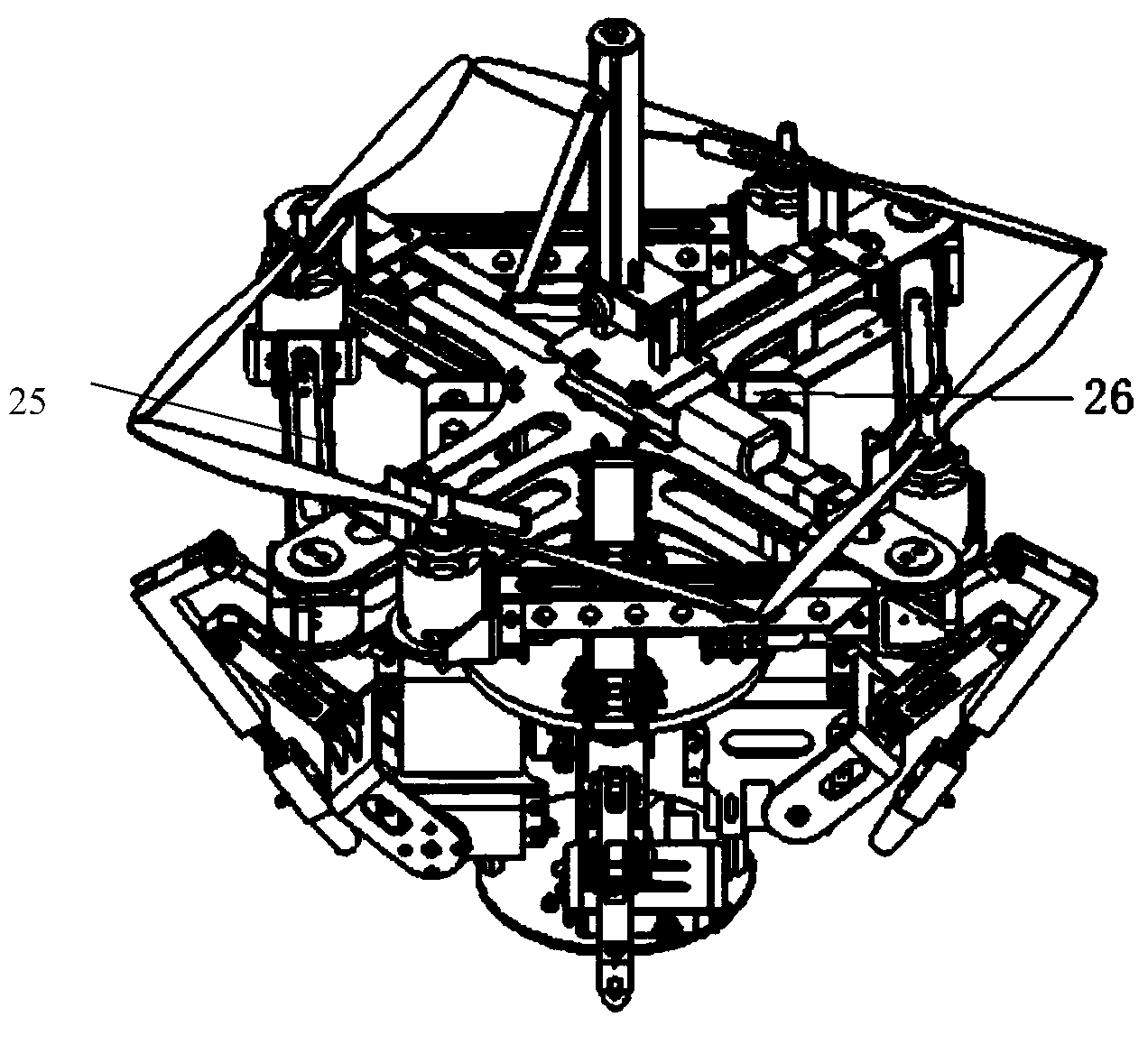
[0036]FIG. 4 is a schematic diagram of the folding frame of the land-air amphibious spherical metamorphic robot. The support arm is composed of a connecting piece (5), a square tube (4), and a motor seat (3). The shaft on the connecting piece (5) and the holes of the upper center plate (6) and the lower center plate (7) form a rotating pair. An end cover (8) is fixed on the connecting piece (5) to prevent the shaft from coming out. The motor (2) is fixed on the motor base (3). The connecting piece (5) forms a rotating pair with the connecting rod-1 (11) through the long steel shaft (10), an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More