

Two-wheel self-balancing robot attitude calculation method based on improved Extended Kalman Filter algorithm
A technique for extending Kalman and filtering algorithms, which is applied in the field of attitude calculation of two-wheel self-balancing robots, and can solve the problems of high filtering accuracy, loss of quadratic term value, and inconvenience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0039] The present invention is applicable to the attitude calculation of a two-wheel self-balancing robot, and is also applicable to a two-wheel self-balancing electric vehicle. Different inertial sensors have different random drift characteristics. Therefore, the error model and attitude calculation model of the inertial sensor are determined first, and the improved extended Kalman filter is used to perform data fusion on the three-axis gyroscope acceleration and attitude measurement data obtained by sampling. Get the attitude information of the two-wheeled self-balancing robot. Below is the concrete technical implementation scheme of the present invention, comprises the steps:
[0040] Step 1, use the gyroscope to calculate the attitude of the two-wheeled self-balancing robot, and obtain the roll angle γ, pitch angle θ and three-axis angular velocity ω x , ω y , ω z relation:
[0041] { γ . ...
Embodiment
[0074] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
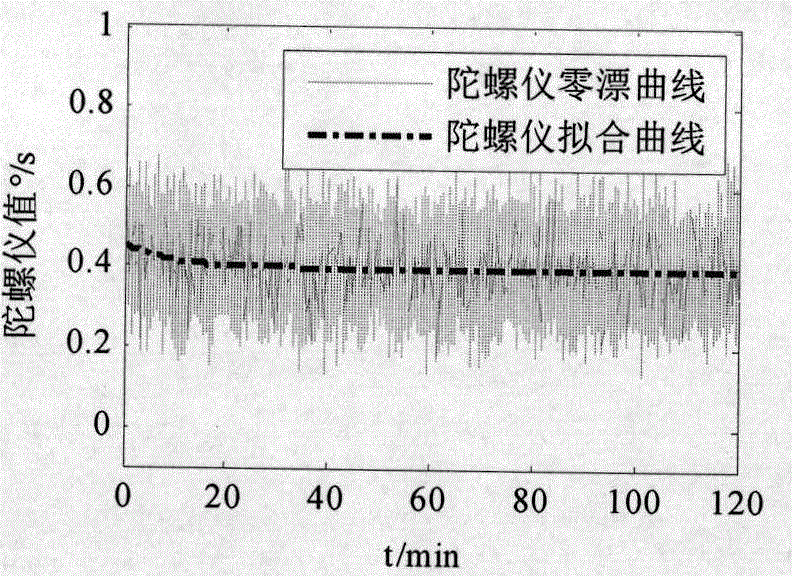
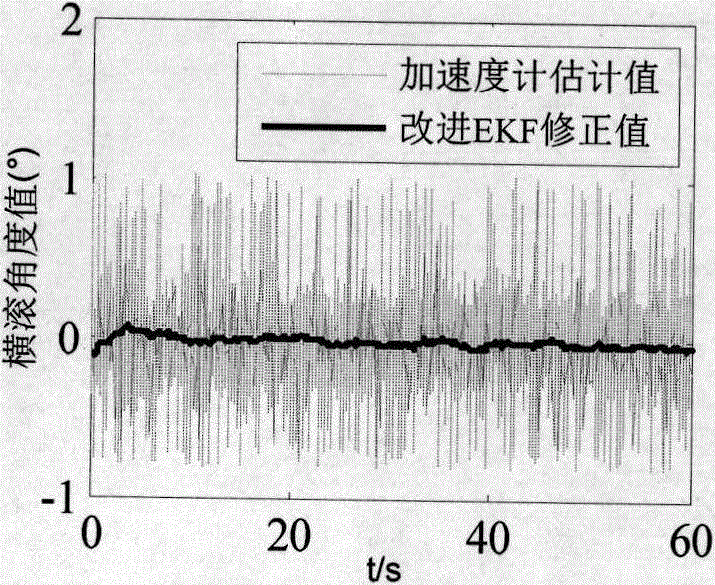
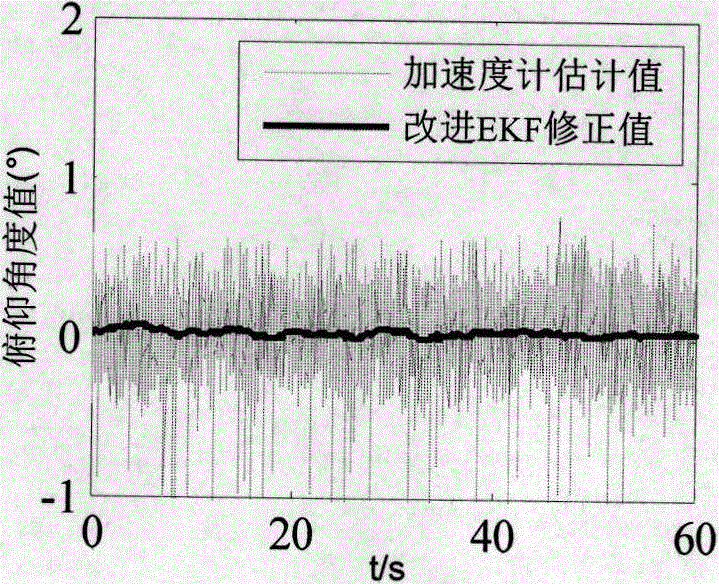
[0075] (1) Static experiment: place the two-wheeled self-balancing robot vertically, and conduct a static experiment under the condition of zero input. At this time, it is considered that there is no influence of non-gravity displacement acceleration, and the curves shown in Figure 2(a)(b) are obtained.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More