Self-locking type pole-climbing robot
A robot and self-locking technology, applied in the direction of sports accessories, climbing, etc., can solve the problems that affect the climbing effect, cannot carry heavy objects, and cannot completely replace manual work, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
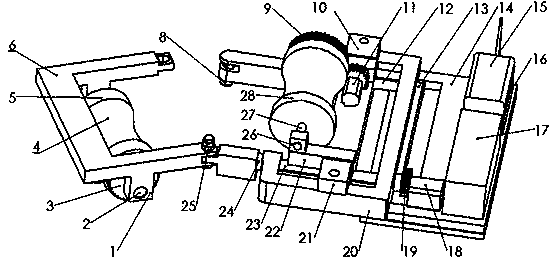
[0022] Such as Figures 1 to 5 As shown, the self-locking pole climbing robot of the present invention includes an upper locking part, a lower locking part and a counterweight part. When working, one end of the upper locking part and the lower locking part is hingedly connected by a bolt, and the other end It is connected by a spring buckle, and the lower locking part is located obliquely below the upper locking part, and the counterweight part is fixed on the lower locking part. The robot can self-lock relative to the cylindrical rod under the action of gravity, thus climbing on the cylindrical rod move.
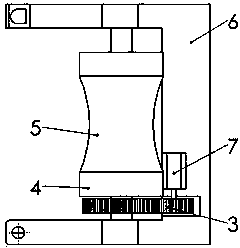
[0023]The upper locking part includes a "U"-shaped frame I6, a bearing module I1, a stepped shaft I2, an arc-shaped driving wheel I5, a gear set I3 and a DC motor I7. The bearing module I 1 is fixed on the "U"-shaped frame I 6, the arc-shaped drive wheel I 5 and the gear set I 3 are fixedly sleeved on the stepped shaft I 2, and the bearing module I 1 is provided with a Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More