

A torsion spring fruit picking device
A technology of fruit and torsion springs, which is applied to harvesting machines, agricultural machinery and implements, and applications. It can solve the problems of complicated debugging and installation process, difficult capture, and high cost, and achieve multi-directional high-efficiency work, flexible operation, and structural integrity. simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
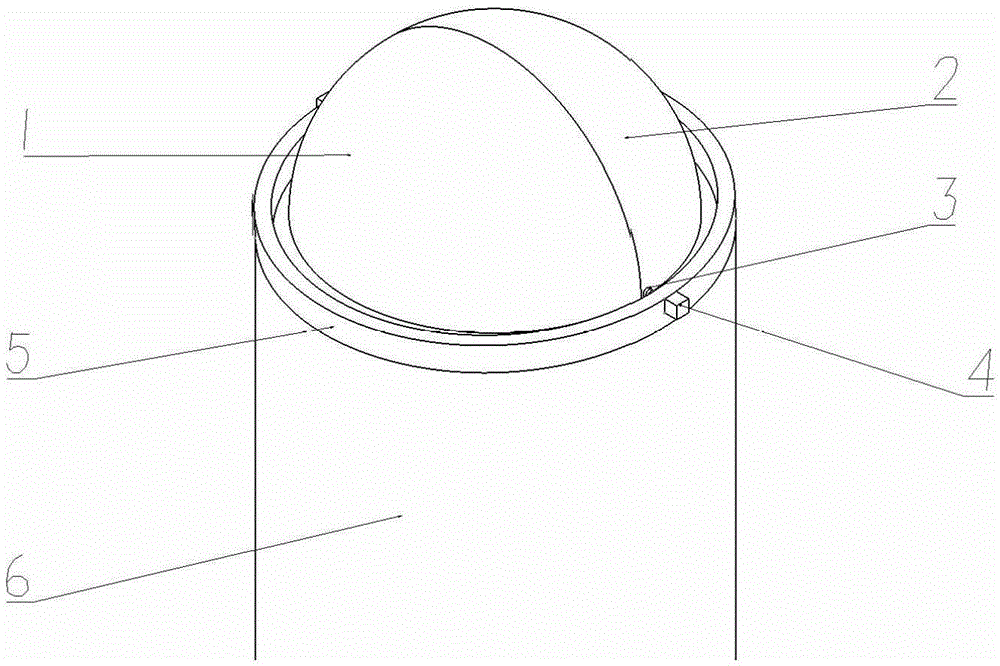
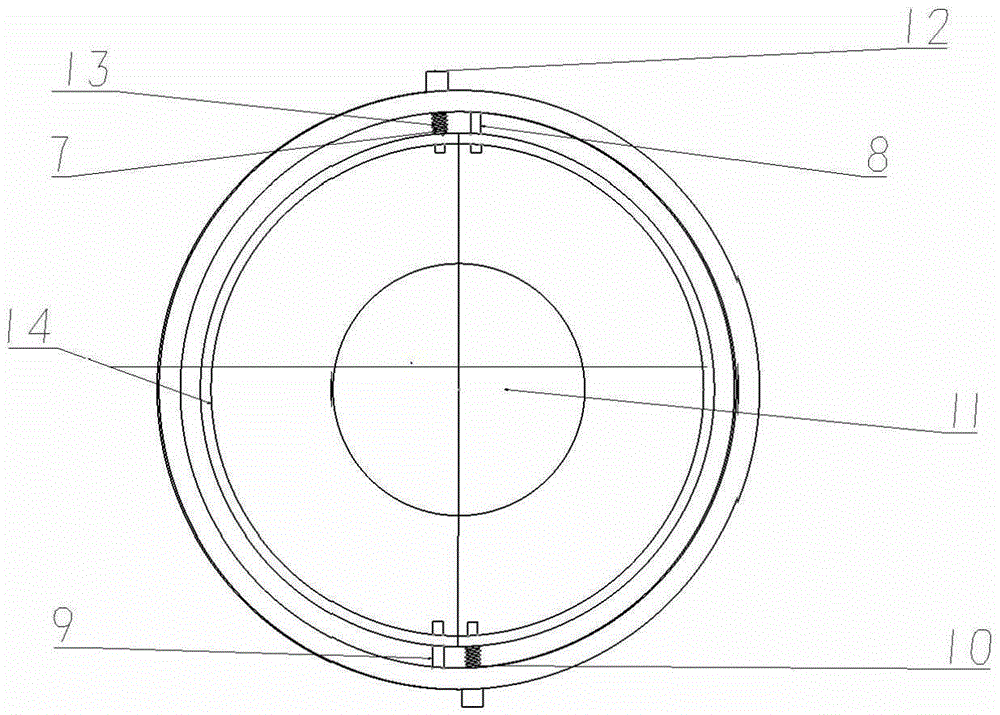
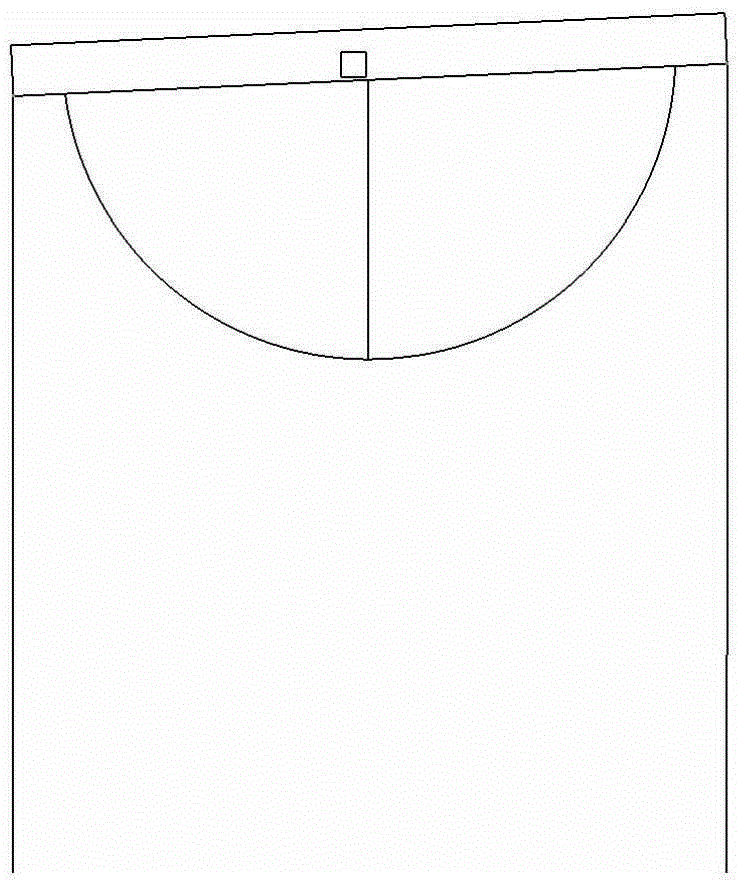
[0019] Such as Figure 1 to Figure 5 As shown, the torsion spring type fruit picking device of the present invention comprises a left palm 1, a right palm 2, a first helical torsion spring 3, a first servo motor 4, a fixed ring 5, a fruit holding net 6, a second The rotating shaft 7, the first fixed shaft 8, the second fixed shaft 9, the first rotating shaft 10, the pressure sensor 11, the second servo motor 12, the second helical torsion spring 13, and the fine-toothed cutter 14. The connections of each part are as follows:
[0020] The left palm 1 can rotate around the second rotating shaft 7 and the second fixed shaft 9, and the right palm 2 can rotate around the first fixed shaft 8 and the first rotating shaft 10; the first helical torsion spring 3 is sleeved on On the first rotating shaft 10, one end of the first helical torsion sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More