

Method for operating a wheel slip control apparatus with compensated wheel speeds
A technology for adjusting devices and wheels, which is applied in transportation and packaging, control/regulation systems, vehicle components, etc., and can solve the problem that the wheel speed difference is no longer accurately compensated
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038]The method according to the invention is carried out within the scope of a wheel slip control device such as ABS (anti-lock brake system) or ASR (drive anti-skid system), which method converts the brake slip and / or The drive slip rate is adjusted or limited to the optimum slip rate. The wheel slip control system is integrated in the driving dynamics control system, such as ESP (Electronic Stability Program).
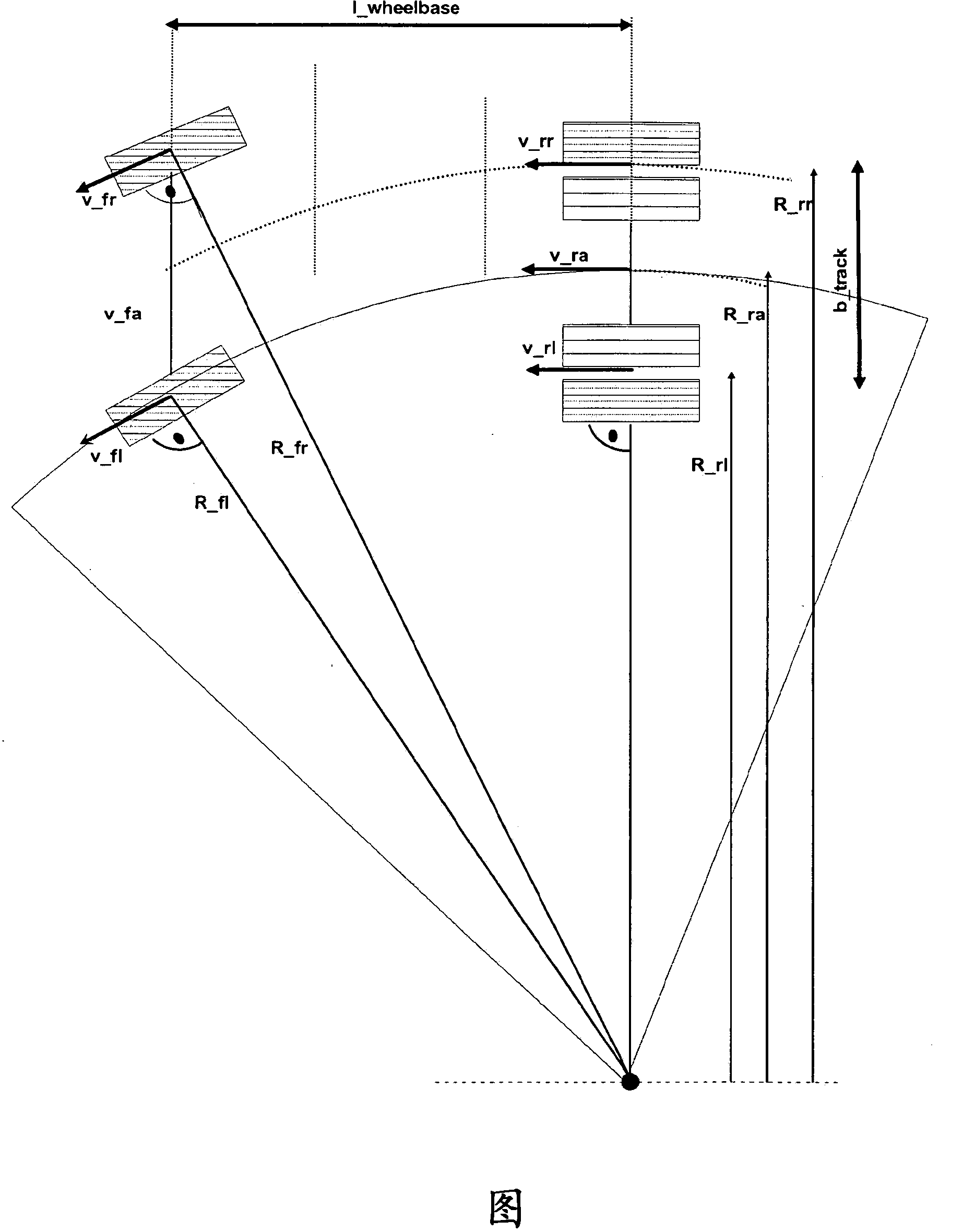
[0039] Steering angle δ from the steering angle sensor, actual-yaw rate ω from the yaw rate detection device z_meas And the vehicle speed v from the wheel speed sensor is provided as sensor information to the controller of the driving dynamics control device. The reference yaw rate ω is also calculated in the controller of the driving dynamics control on the basis of the steering angle δ and the vehicle speed v z_ref , the reference-yaw rate is the target-yaw rate desired by the driver.
[0040] By means of the method described below, a compensated wheel speed i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More