

Finger mechanism of anthropomorphic myoelectrical artificial hand
A myoelectric and prosthetic hand technology, which is applied in prosthetics, medical science, etc., can solve the problems of not being able to grasp multiple gestures, not being able to realize the relative movement of fingers and knuckles, and limiting the application range of prosthetic hands, etc., to achieve simple structure and appropriate Safe and reliable operation function and structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The purpose of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
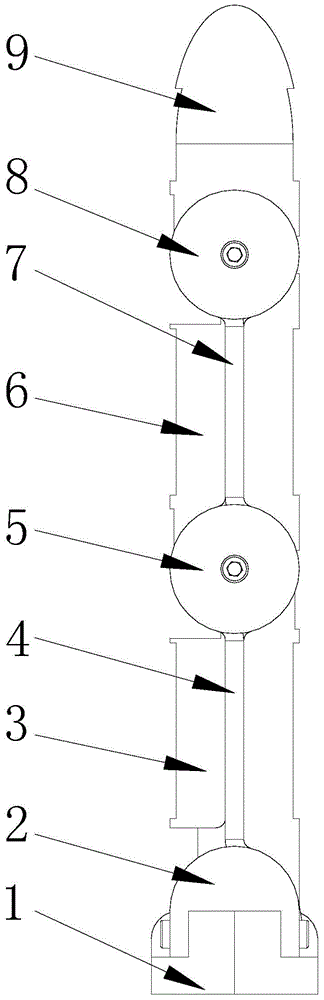
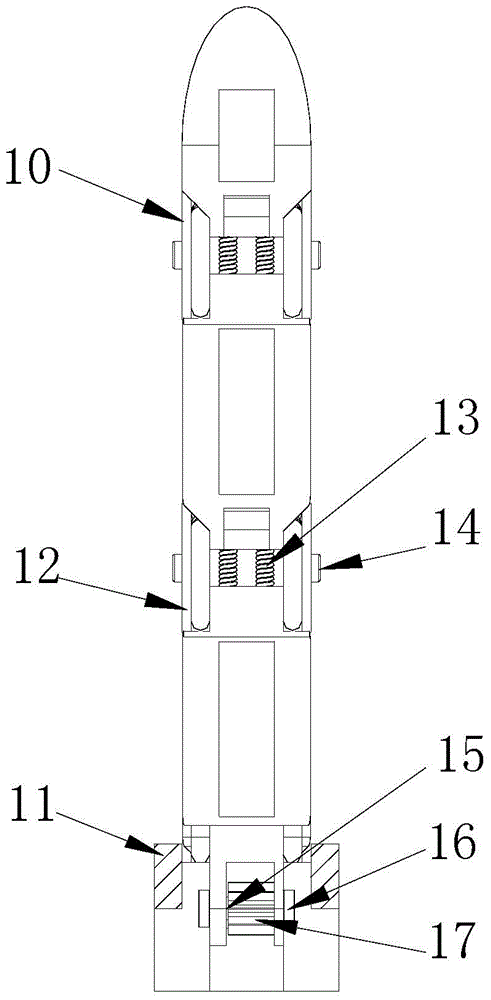
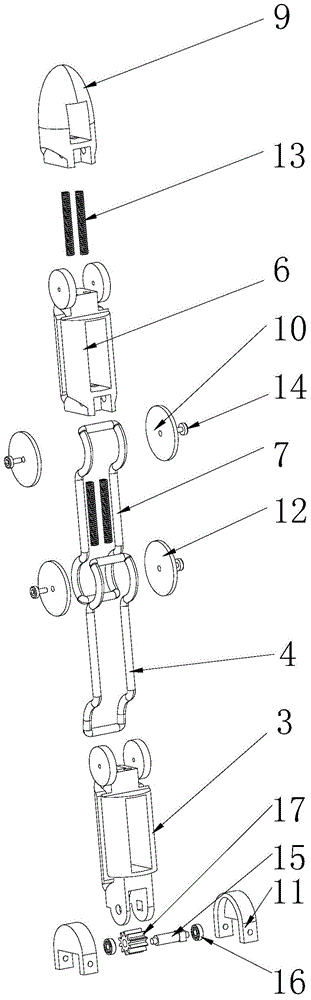
[0041] Such as Figures 1 to 3 As shown, a finger mechanism of a humanoid myoelectric prosthetic hand includes base 1, proximal phalanx 3, middle phalanx 6 and distal phalanx 9 from bottom to top, and also includes metacarpal joint 2, proximal phalanx joint 5, Distal phalangeal joint 8, proximal driving tendon 4 and distal driving tendon 7, the base 1 and proximal phalanx 3 are rotationally connected through metacarpal joint 2, and the proximal phalanx 3 and middle phalanx 6 are rotationally connected through proximal phalanx joint 5, The middle phalanx 6 and the distal phalanx 9 are rotationally connected through the distal phalanx joint 8; the proximal driving t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More