

Spray painting robot for rust removal of large pipe
A technology for spraying robots and pipes, applied in the field of robots, can solve problems such as danger and accidents, and achieve the effect of powerful functions and less space occupied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
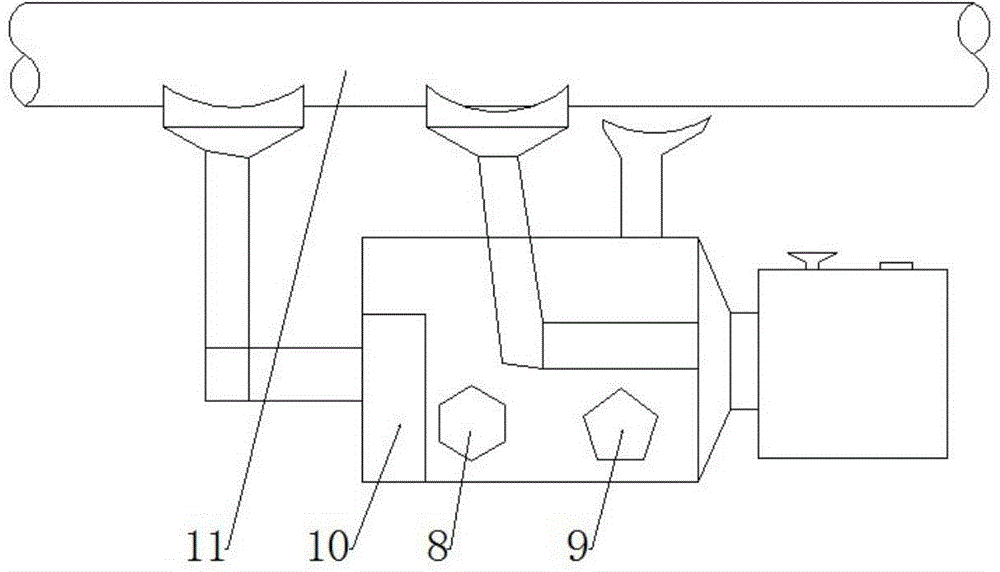
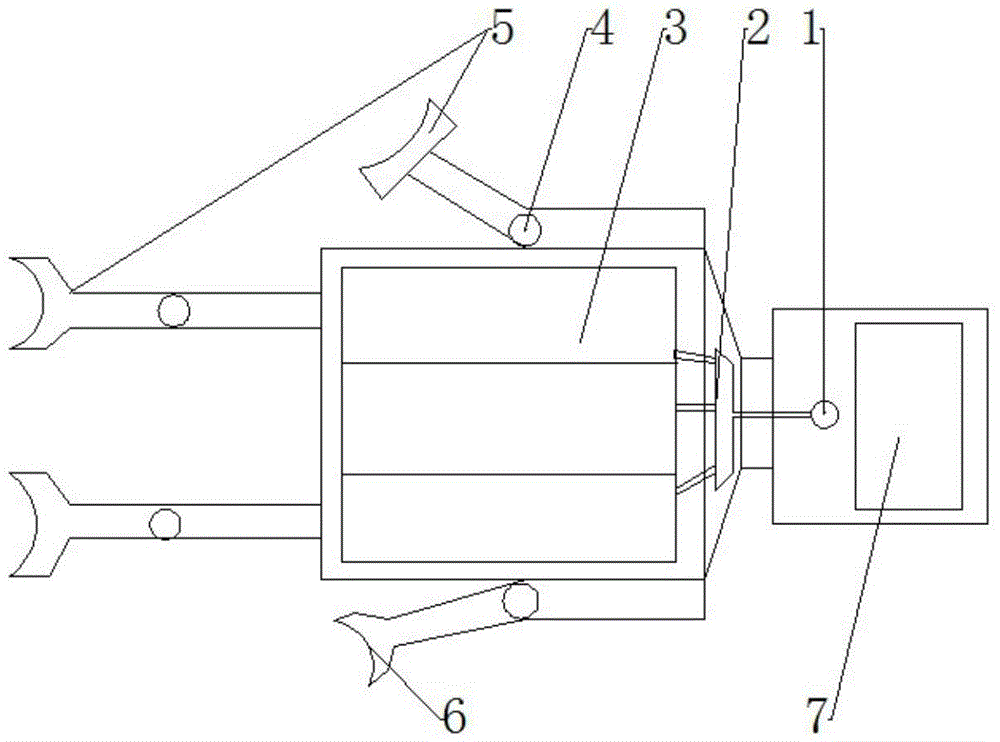
[0014] The large-scale pipeline derusting and spraying robot of the present invention is composed of the following parts: nozzle 1, material spraying mixing device 2, material spraying storage device 3, linkage device 4, controllable magnetic adsorber 5, derusting manipulator 6, industrial controller 7, power module 8. Data transmission module 9, accumulator 10, pipeline 11.
[0015] The working principle of the present invention is as follows: the robot can be remotely controlled by people or intelligently operated by itself. The human sends instructions to the industrial controller 7 of the robot, and the industrial controller 7 starts to work, and issues work instructions according to the work tasks received by the industrial controller. The industrial controller derusts the target through the robot data transmission module 9, and polishes t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More