

Foot wheel type robot leg structure and foot wheel type robot with same
A robot and wheel-foot technology, applied in the field of robots, can solve the problems of insufficient walking stability, difficulty in adapting to complex terrain, and poor cushioning performance, and achieve the effects of easy deformation, strong adaptability and good cushioning performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
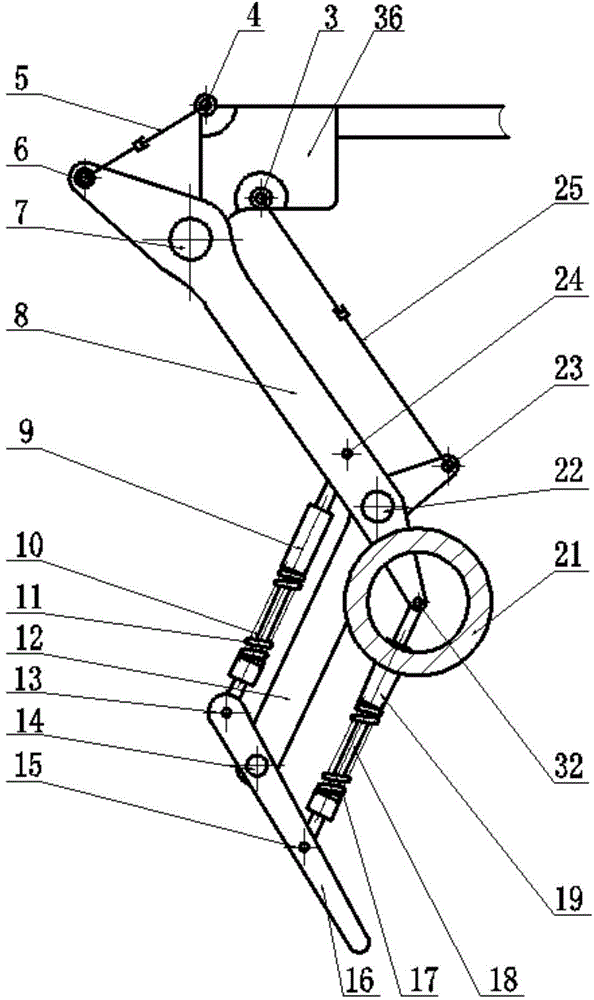
[0037] Embodiment 1: a kind of robot leg structure, its structure is as figure 1 , Figure 4 shown, including:
[0038] Body shoulder 36, the body shoulder 36 has a first hinge node, pin shaft 7 is arranged in the first hinge node, the upper side of the first hinge node is a second hinge node, pin shaft 4 is arranged in the second hinge node , the right side of the first hinge node is the third hinge node, and the pin shaft 3 is arranged inside the third hinge node;
[0039] The upper end of the thigh rod 8 is hinged with the body shoulder 36 through the pin shaft 7, the top of the thigh rod 8 is hinged with the hip joint hydraulic cylinder 5 through the pin shaft 6, and the other end of the hip joint hydraulic cylinder 5 is connected with the body shoulder through the pin shaft 4. Part 36 is hinged;
[0040] The lower end of the thigh rod 8 is hinged with the upper end of the calf rod 12 through the pin shaft 22, the top of the calf rod 12 is hinged with the knee joint hyd...
Embodiment 2
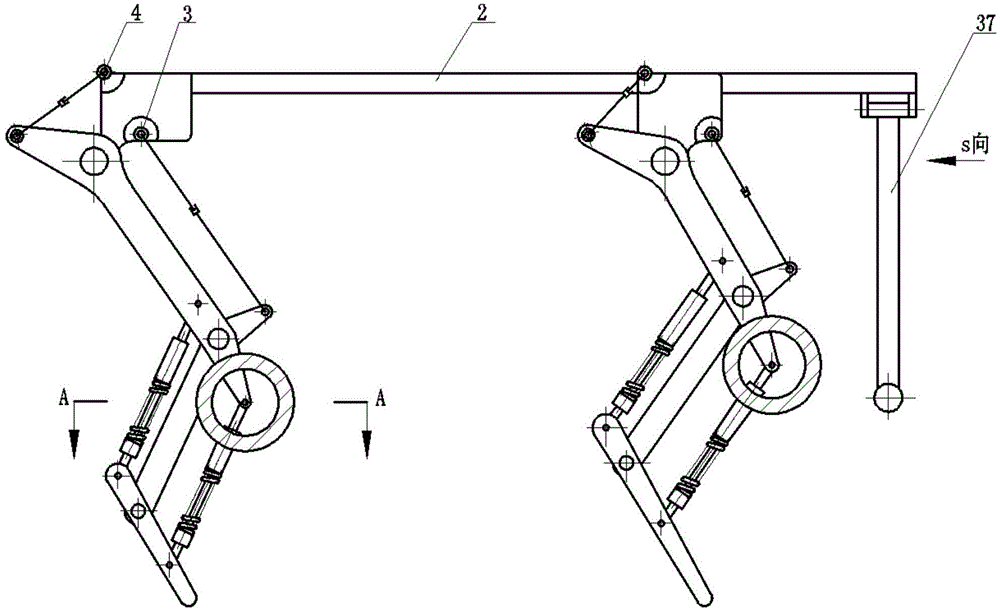
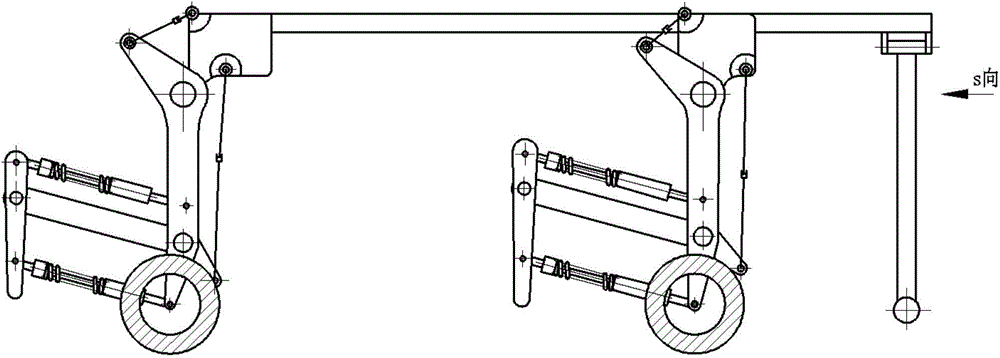
[0050] Such as Figure 1-5 As shown, the present invention also provides a wheel-foot robot, which has a body 2 on which four robot leg structures described in Embodiment 1 are installed. The body shoulders 36 are welded to the body 2 .
[0051] The front end of the robot is provided with an obstacle removal unit. Specifically, the wrecker unit includes a left side wrecker bar 37 and a right side wrecker bar 38 hinged to the body 2, and the left side wrecker bar 37 is also hinged to the left side wrecker bar hydraulic cylinder 34 , the other end of the left wrecker hydraulic cylinder 34 is hinged with the body 2; the right wrecker 38 is also hinged with the right hydraulic cylinder 33, and the other end of the right hydraulic cylinder 33 It is also hinged with the body 2; and the bottom ends of the left side wrecker bar 37 and the right side wrecker bar 38 are all provided with a wrecker block 35 .
[0052] continue to refer figure 1 and figure 2 As shown, under uneven r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More