

Line patrol robot capable of climbing poles and towers and climbing method
A line-inspecting robot and pole-climbing technology, applied in the field of line-inspecting robots, can solve the problems of difficult center of gravity adjustment attitude control, high labor intensity, and low work efficiency, so as to enhance autonomous intelligence, improve inspection efficiency, and overcome obstacles The effect of ability improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
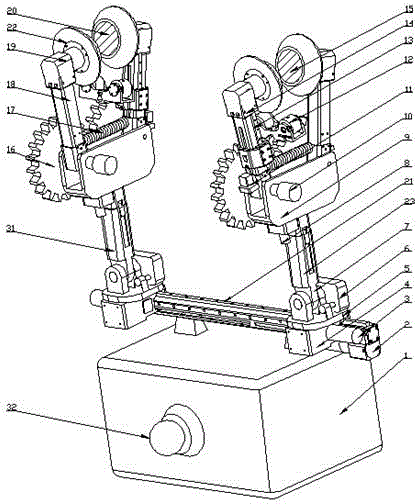
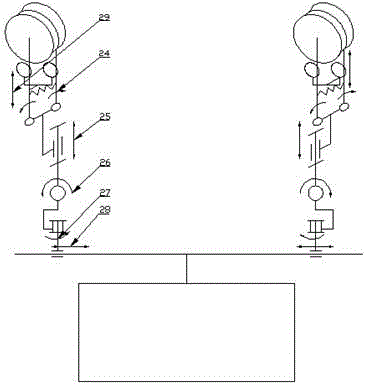
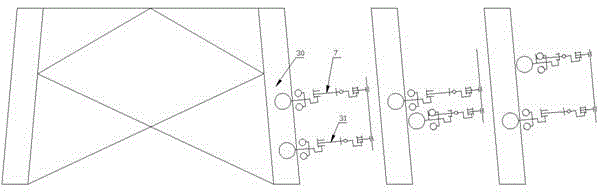
[0026] exist figure 1Among them, the line patrol robot is mainly composed of a body 1, a moving guide rail 21, an odd arm 7, and an even arm 31. The odd arm 7 and the even arm 31 are symmetrically arranged along the moving direction of the moving guide rail 21 and have the same structure, and only the structure of the odd arm is introduced here. Odd arm 7 is made up of forearm 18 and symmetrical arm 13, groove arm 9, big arm 23 that half roller 22 is installed. The inside of the half roller 22 of the small arm 18 is equipped with an electromagnet 15 composed of an iron core wound with a wire, and the iron core wound with the wire is located in the roller housing 19; the inside of the half roller 22 of the symmetrical arm 13 is equipped with a permanent magnet 20, which drives the half roller to roll The rolling motor 14 is located outside the half roller 22, the inside of the symmetrical arm 13 is equipped with a screw nut mechanism, and the moving motor 11 is located outside...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More