

A method for realizing the rapid and large pitch angle change motion of a pectoral fin flapping robotic fish
An implementation method and pitch angle technology, applied in the field of bionics, can solve the problem that the tail fin cannot achieve large pitch attitude changes, and achieve the effect of reducing the dimension
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
[0018] The technical scheme mainly protected by the present invention:
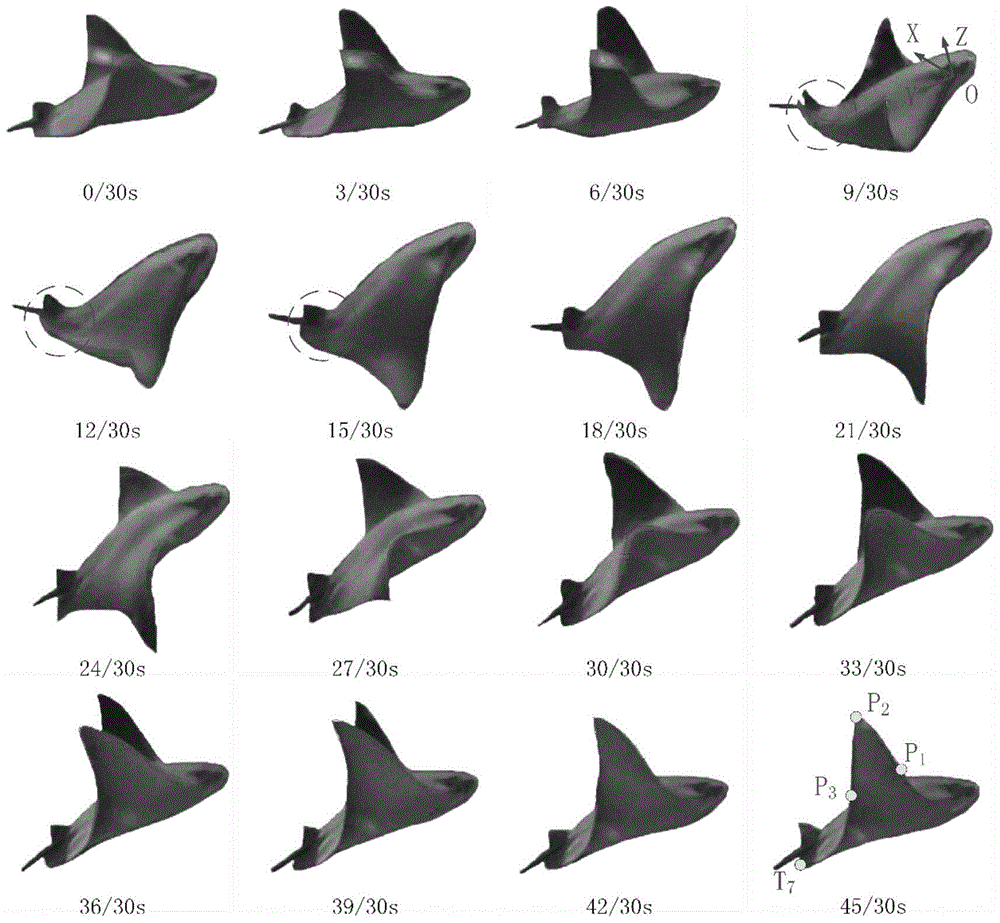
[0019] (1) Propose the kinematics model of the pectoral fin flapping fish’s pectoral fin and tail joint flapping to achieve rapid pitching, including the spatial asymmetry characteristics during the pectoral fin flapping process (taking the fish trunk plane as the reference plane, the upper side of the trunk plane The flapping amplitude of the pectoral fin is not equal to the flapping amplitude of the lower side), the characteristics of temporal asymmetry (the time of the downward flapping stroke of the pectoral fin is not equal to the time of the upward flapping stroke), the spatial and temporal asymmetry of the tail flapping characteristics, and the relation of pectoral fins to tail motion.
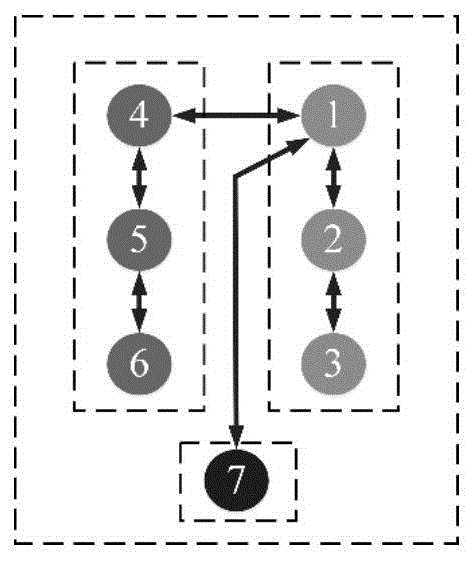
[0020] (2) Propose a CPG control method based on the phase oscillator model to realiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More