

Probe servo angle control method and control mode, imaging system based on control module and imaging method of system
An angle control, probe technology, applied in scanning probe technology, scanning probe microscopy, measuring devices, etc., can solve problems such as inability to continuously control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
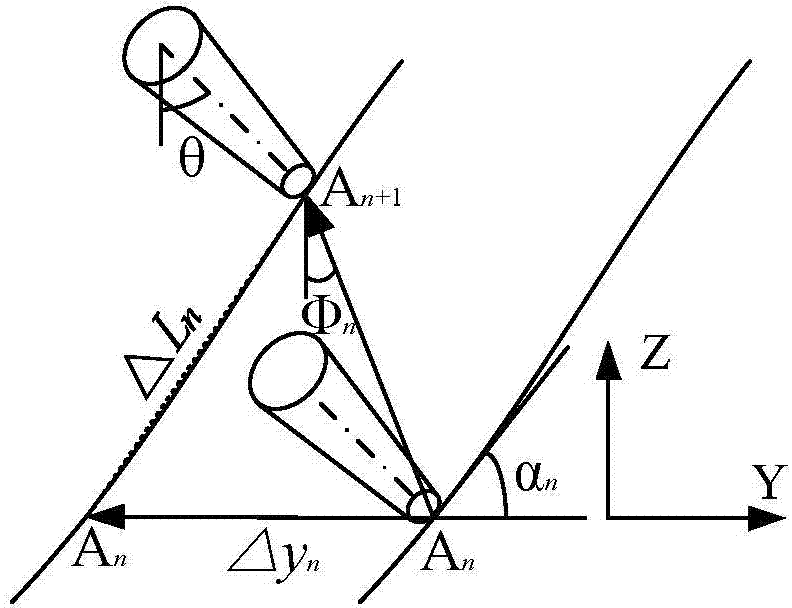
[0038] Specific implementation mode one: combine figure 1 with Figure 9 To illustrate this embodiment, the probe servo angle control method described in this embodiment includes the following steps:
[0039] Coordinate value collection step: collect the current coordinate value of the nanopositioning stage that drives the probe or the sample stage to move during the scanning process; and execute the probe servo angle calculation step after this step;
[0040] Probe servo angle calculation steps: Φ n = 1 2 Σ i = 1 m ( Σ j = 1 p arctan ( z ( ...
specific Embodiment approach 2
[0056] Embodiment 2: The probe servo angle control module described in this embodiment includes the following devices:
[0057] Coordinate value acquisition device: collect the current coordinate value of the nanopositioning stage that drives the probe or sample stage to move during the scanning process; and start the probe servo angle calculation device after the device runs;
[0058] Probe servo angle calculation device: Φ n = 1 2 Σ i = 1 m ( Σ j = 1 p arctan ( z ( n - ...
specific Embodiment approach 3
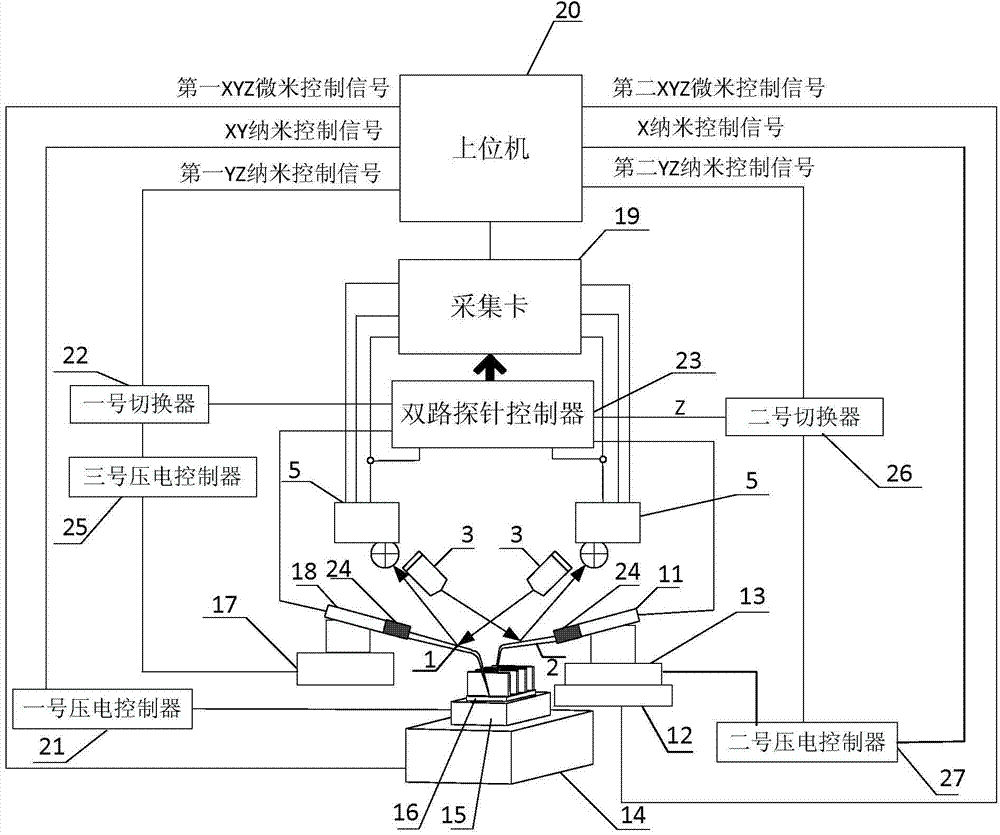
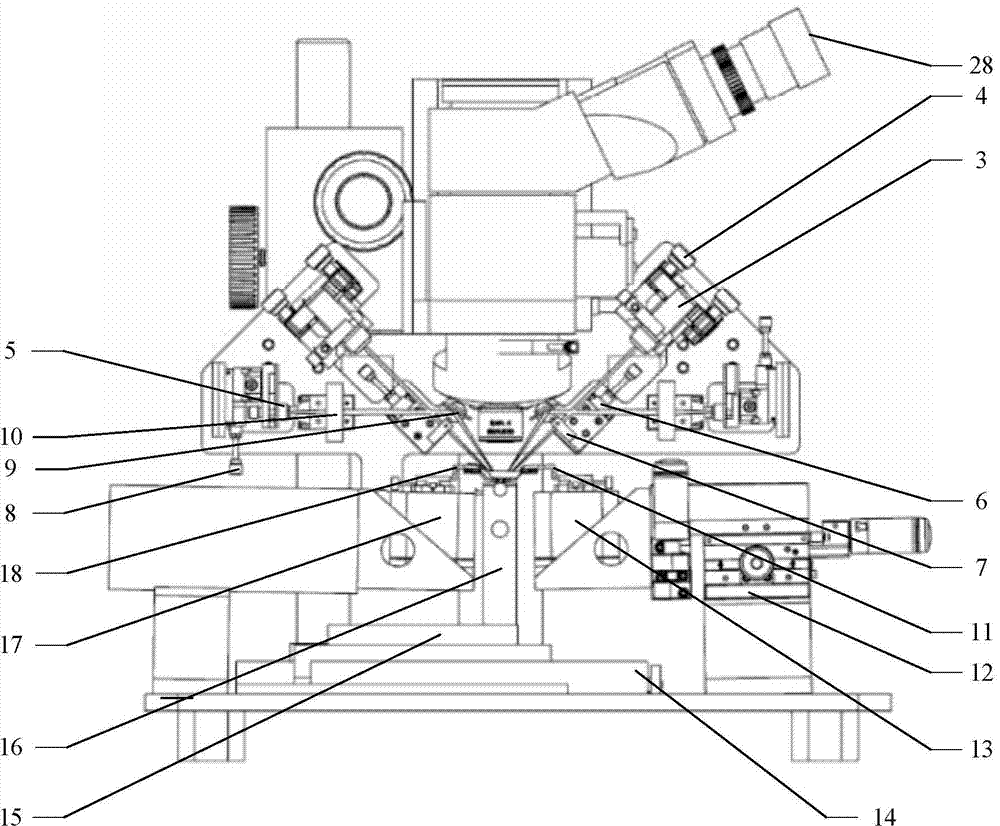
[0060] Specific implementation mode three: combination Figure 2 to Figure 4 Describe this embodiment. This embodiment is an imaging system based on the probe servo angle control module described in Embodiment 2. The imaging system includes an optical microscope 28, a host computer 20, a laser force measurement system I, a laser force measurement system II, The first probe hand 18, the second probe hand 11, XYZ micro-positioning stage II12, XYZ nano-positioning stage II13, XYZ micro-positioning stage III14, XY nano-positioning stage III15, sample stage 16 and YZ nano-positioning stage I17, two-way Probe controller 23, acquisition card 19, No. 1 piezoelectric controller 21, No. 2 piezoelectric controller 27, No. 3 piezoelectric controller 25, No. 1 switcher 22, No. 2 switcher 26 and the two have the same structure the probe holder 24;
[0061] The probe holder 24 includes a base 24-1 and a rotating arm 24-3, the rotating arm 24-3 is arranged on the base 24-1, and the rotating ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More