

Multi-resolution indoor three-dimensional scene reconstitution device and method based on laser radar and quadrotor
A four-axis aircraft, three-dimensional scene technology, used in aircraft, measuring devices, transportation and packaging, etc., can solve the problems of single resolution and unable to reconstruct indoor three-dimensional scenes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
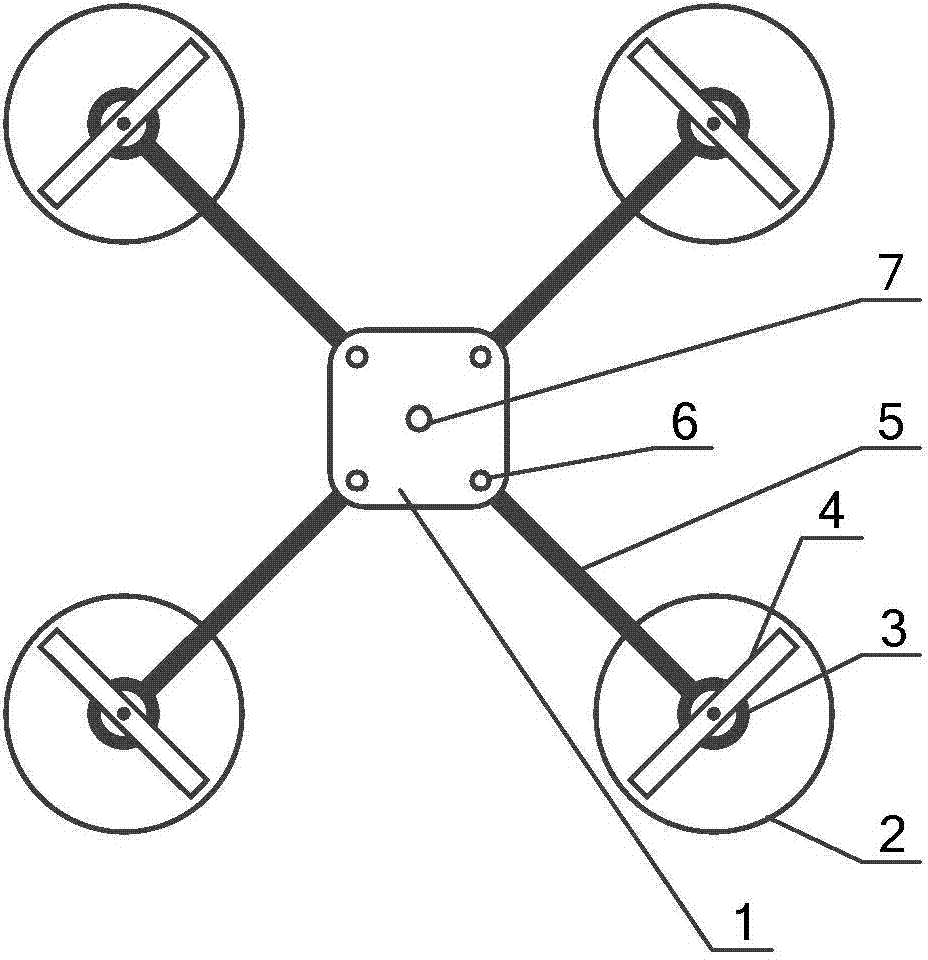
[0042] Specific implementation mode one, such as figure 1As shown, the multi-resolution indoor three-dimensional scene reconstruction device based on laser radar and quadcopter of the present invention includes a quadcopter, and the quadcopter includes a main body 1, four sets of propellers and motor protection covers 2, four One group of DC motors 3, four groups of propellers 4, four groups of support arms 5, four symmetrical screw holes 6 of the main body and through holes 7 on the main body constitute. The four sets of protective covers 2 are connected to the main body 1 through corresponding support arms 5, the four sets of DC motors 3 are connected to the corresponding four sets of propellers 4 through motor shafts, and the four sets of DC motors 3 are connected to the support arms 5. The four support arms 5 are crossed, and the angle of two adjacent support arms is 90 degrees. The main body 1 also includes four symmetrical screw holes 6 for connecting and fixing with the...
specific Embodiment approach 2
[0051] Embodiment 2. A multi-resolution indoor three-dimensional scene reconstruction method based on laser radar and quadcopter, the specific steps are:
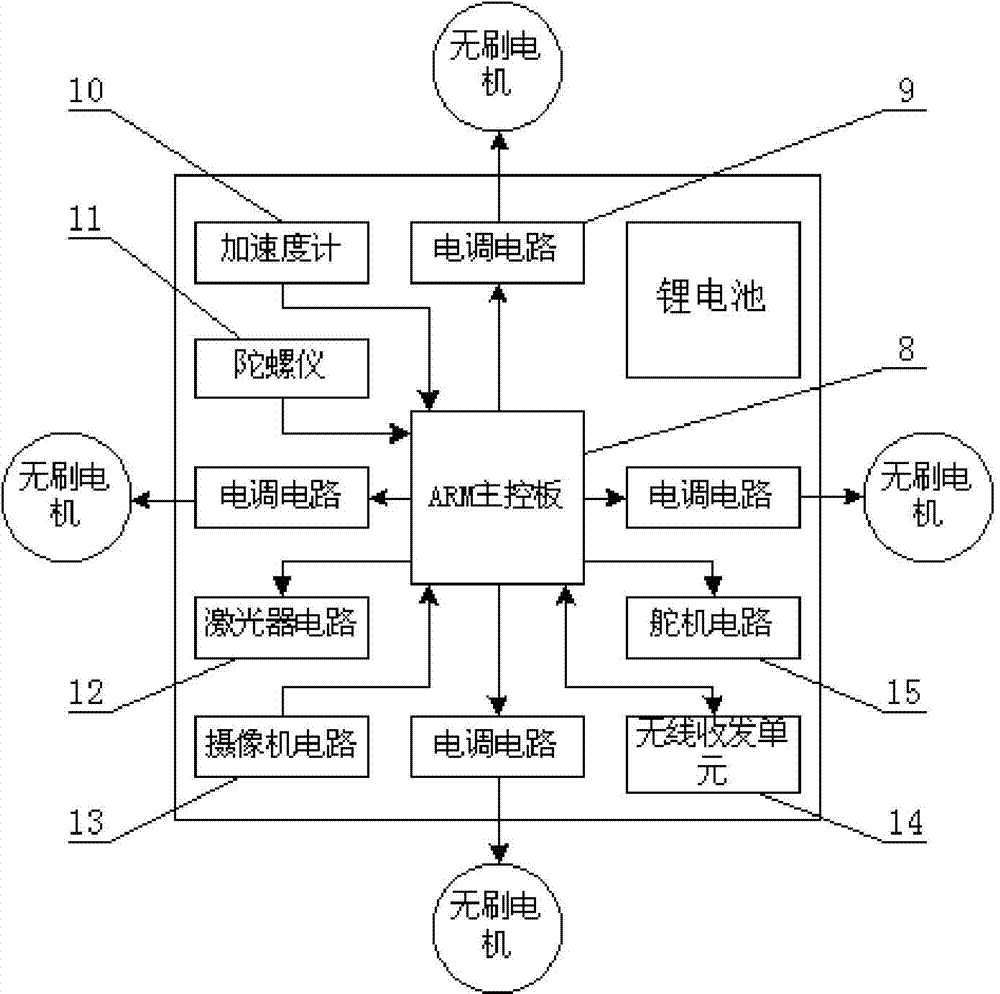
[0052] Step 1, the ground control microcomputer 17 sends control instructions to the quadcopter by wireless means to control the attitude and position of the quadcopter flying indoors. The angular velocity and acceleration information of the three axes of the vehicle, and transmit this information to the ARM main control board 8, and the ARM main control board 8 calculates the current attitude of the quadcopter based on these information, and calculates the current attitude, position and the required control The error between attitude and position, and then drive four DC motors 3 through four electric regulation circuits 9, so as to achieve the purpose of quadcopter flight attitude and position control.
[0053] Step 2. When the attitude and position of the quadcopter are stable, the ARM main control board 8 will send instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More