

Image retrieval method based on robot vision platform
A technology of robot vision and image retrieval, applied in the field of image recognition, can solve problems such as large amount of calculation, complicated implementation, and many parameters, and achieve the goal of improving accuracy and reference value, improving accuracy and objectivity, and intelligent knowledge correlation ability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
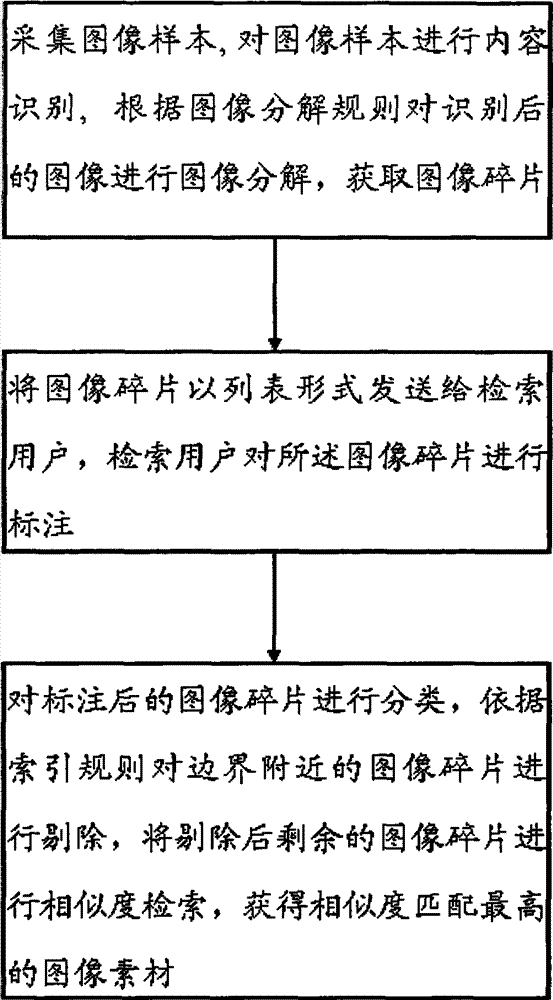
[0020] Such as figure 1 As shown, it is a flow chart of an image retrieval method based on a robot vision platform proposed by an embodiment of the present invention, including:
[0021] Use the binocular camera to collect image samples, identify the content of the image samples, decompose the recognized image according to the image decomposition rules, and obtain image fragments; send the image fragments to the retrieval user in the form of a list, and the retrieval user will mark the image fragments ;According to the support vector machine model, classify the marked image fragments, find the boundary of the image fragment set, eliminate the image fragments near the boundary according to the index rules, perform similarity retrieval on the remaining image fragments after elimination, and obtain similarity matching Highest image footage.
[0022] The image sample collected by the binocular camera can be a single frame or a small segment of image sample with continuous frames....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More