

Method for controlling paths of spray robot
A technology for spraying robots and paths, which is applied in the direction of spraying devices, etc., and can solve problems such as complex operation of robot off-line programming software, simulated spraying paths, and absence of plate workpieces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] A detailed description will be given below of embodiments of the present invention. Although the present invention will be described and illustrated in conjunction with some specific embodiments, it should be noted that the present invention is not limited to these embodiments. On the contrary, any modification or equivalent replacement made to the present invention shall be included in the scope of the claims of the present invention.
[0095] In addition, in order to better illustrate the present invention, numerous specific details are given in the specific embodiments below. It will be understood by those skilled in the art that the present invention may be practiced without these specific details. In other instances, well-known methods, processes, components and circuits are not described in detail so as to highlight the gist of the present invention.
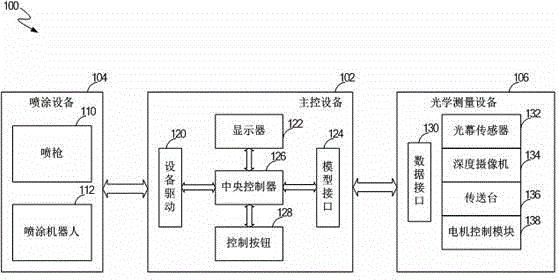
[0096] figure 1 Shown is an intelligent robotic painting system 100 according to an embodiment of the present...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More