

Error quaternion-based transmission aligning method under large heading misalignment angle
A technology of error quaternion and transfer alignment, applied in measurement devices, instruments, etc., can solve problems such as poor robustness and nonlinear transfer alignment model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be described in further detail below in conjunction with the accompanying drawings.
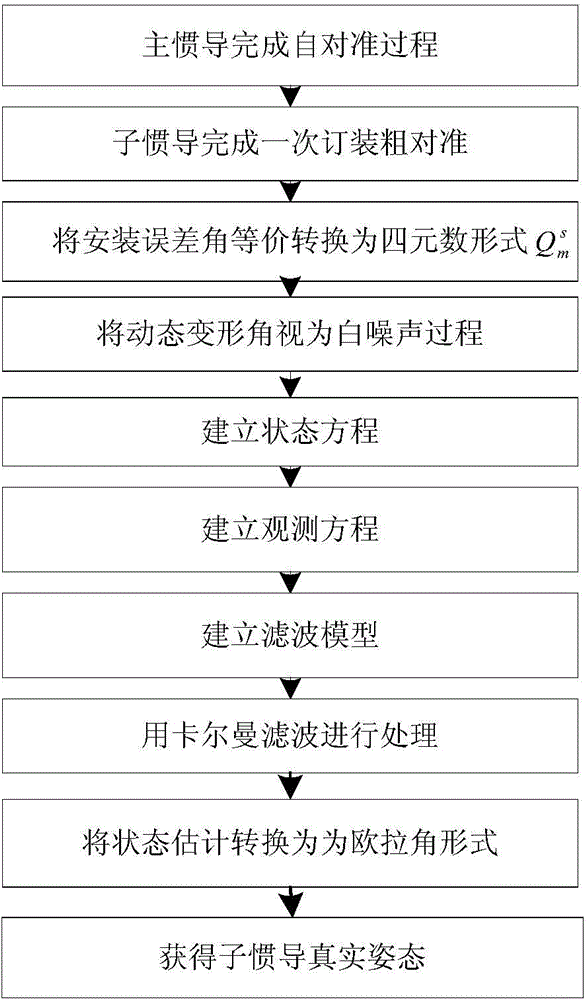
[0065] as attached figure 1 Shown, concrete method of the present invention and corresponding steps are:
[0066] Step 1. Install both the main inertial navigation system and the sub-inertial navigation system on the carrier, make the main inertial navigation system complete the self-alignment process, and establish the main inertial navigation system as m, so as to obtain the real attitude of the main inertial navigation system and the main inertial navigation system m to The strapdown matrix of geographic system n
[0067] Step 2. Copy the speed, position, attitude and other navigation information of the main inertial navigation system that has been aligned in step 1 as the initial value directly to the sub-inertial navigation system that needs to be aligned, so that the sub-inertial navigation system can complete a binding Coarse alignment process, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More