Transformable triphibian robot
A robot and motor technology, applied in the field of deformable amphibious robot devices, can solve the problems of deformation, damage, robot damage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
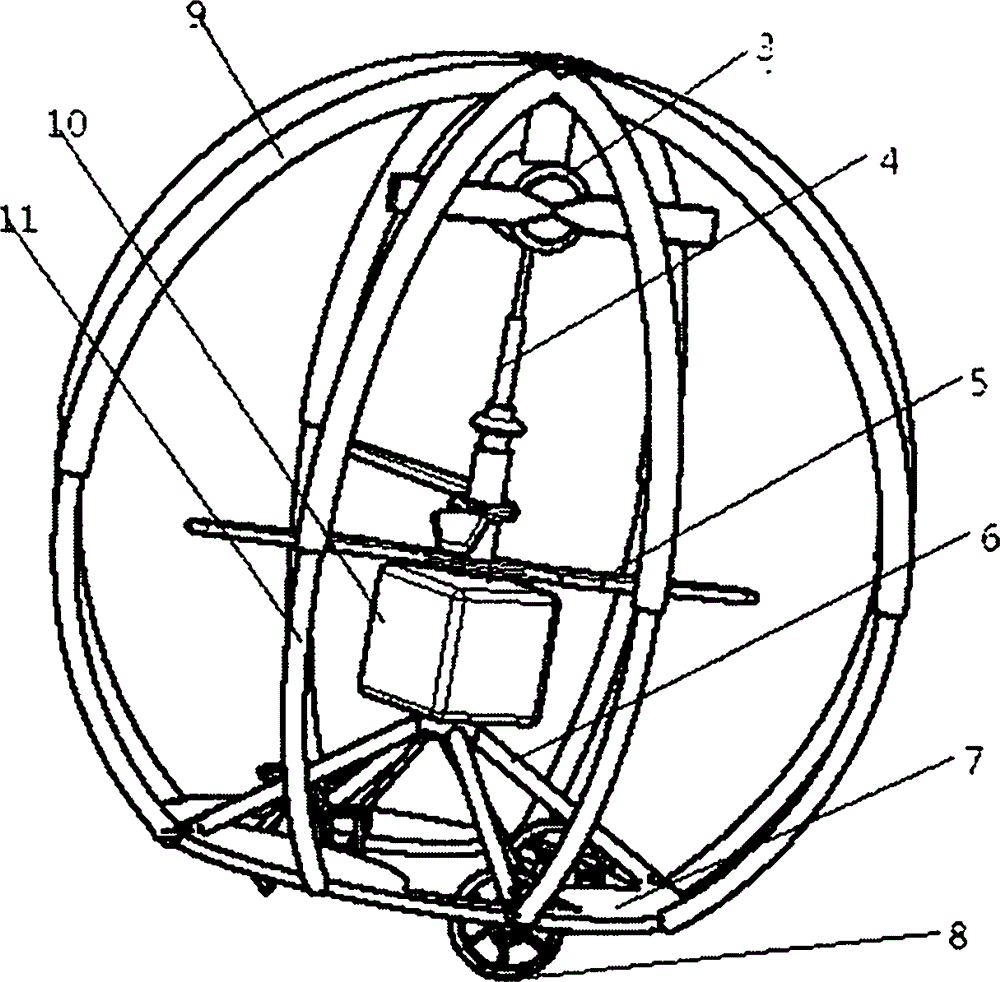
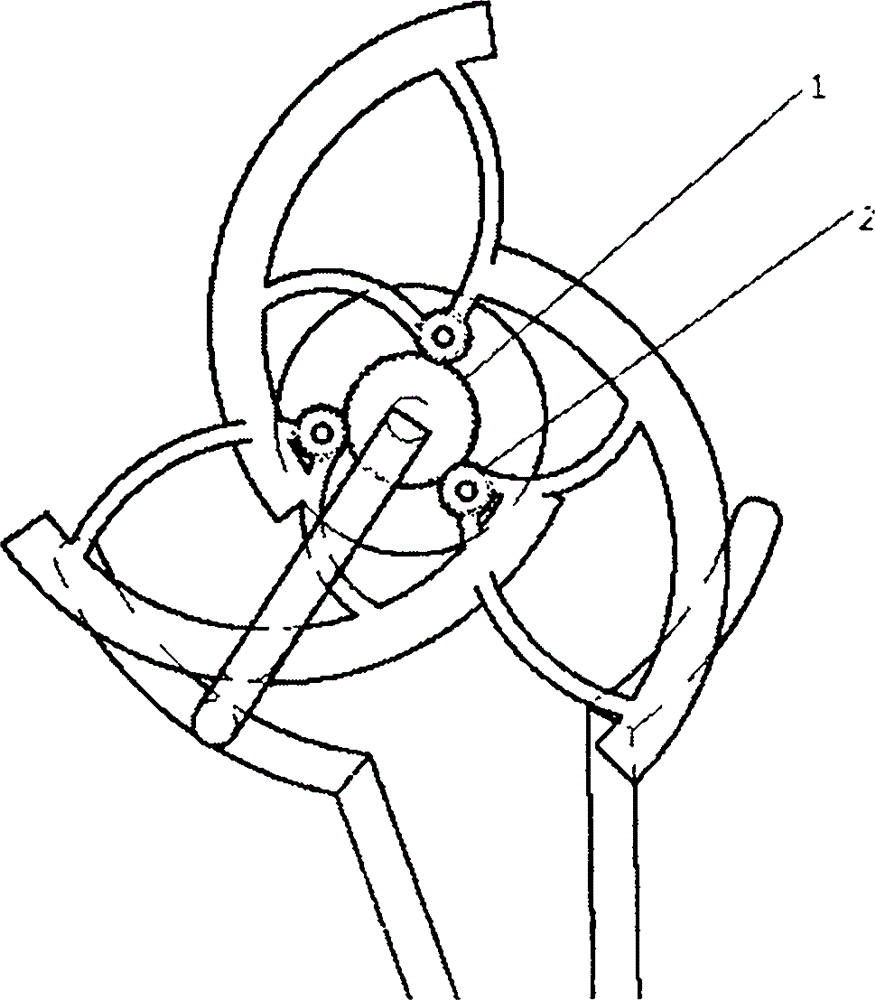
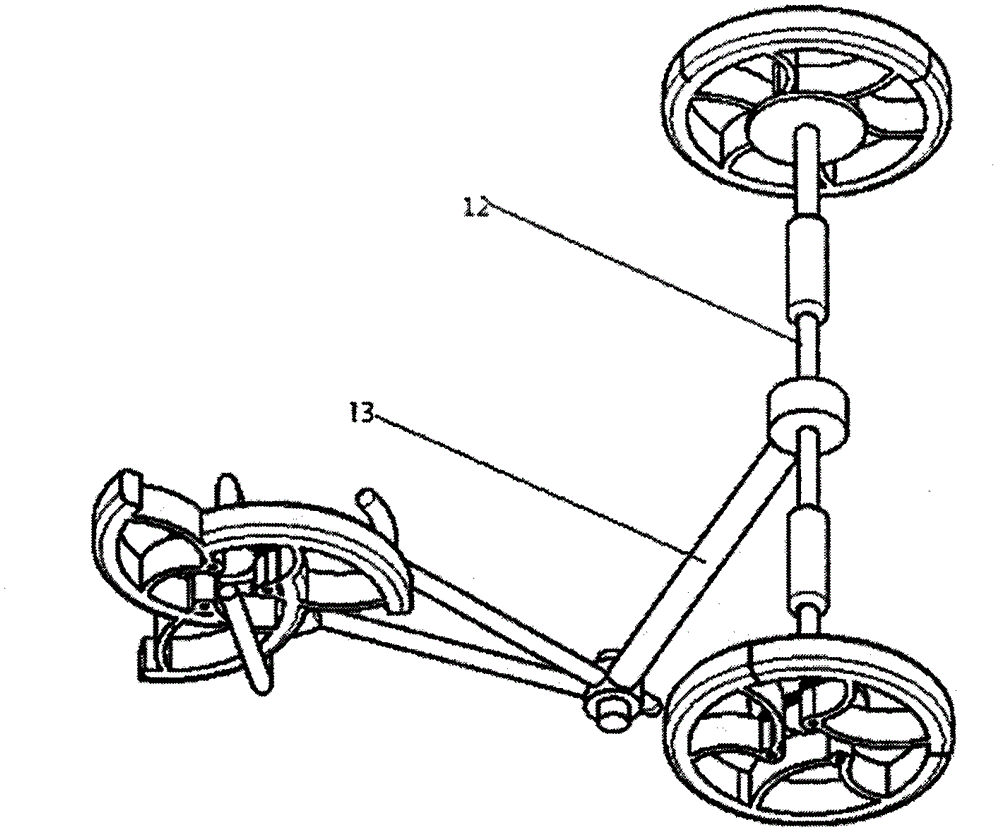
[0012] The present invention will be further described below in conjunction with the accompanying drawings.
[0013] Such as figure 1 , figure 2 and image 3 As shown, a deformable amphibious robot according to the present invention consists of large gear, 1 pinion, 2 signal receivers, 3 electric telescopic rods, 4 propellers, 5 brackets, 6 chassis, 7 deformable wheels, 8 upper hemispherical shells, 9 small motors and 10 lower parts Hemispherical shell 11 bearing 12 transmission shaft 13 is formed, electric telescopic rod 4 lower side is connected with propeller 5 and small motor 10, upper side is connected with upper hemispherical housing 9, small motor 10 is connected with support 6 and transmission shaft 13 at the bottom, deformable wheel 8 is connected with the transmission shaft 13 and the small motor 10 through the bearing 12. When the robot accidentally bumps into a hard wall, it is known from the impulse formula I=Ft that the soft and elastic shell made of plastic a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com