

Agricultural vehicle independent navigation steering control method based on disturbance observer
A disturbance observer and agricultural vehicle technology, applied in two-dimensional position/course control, adaptive control, general control system, etc., can solve problems such as insufficient robustness and stability, and achieve the effect of intelligent and precise navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
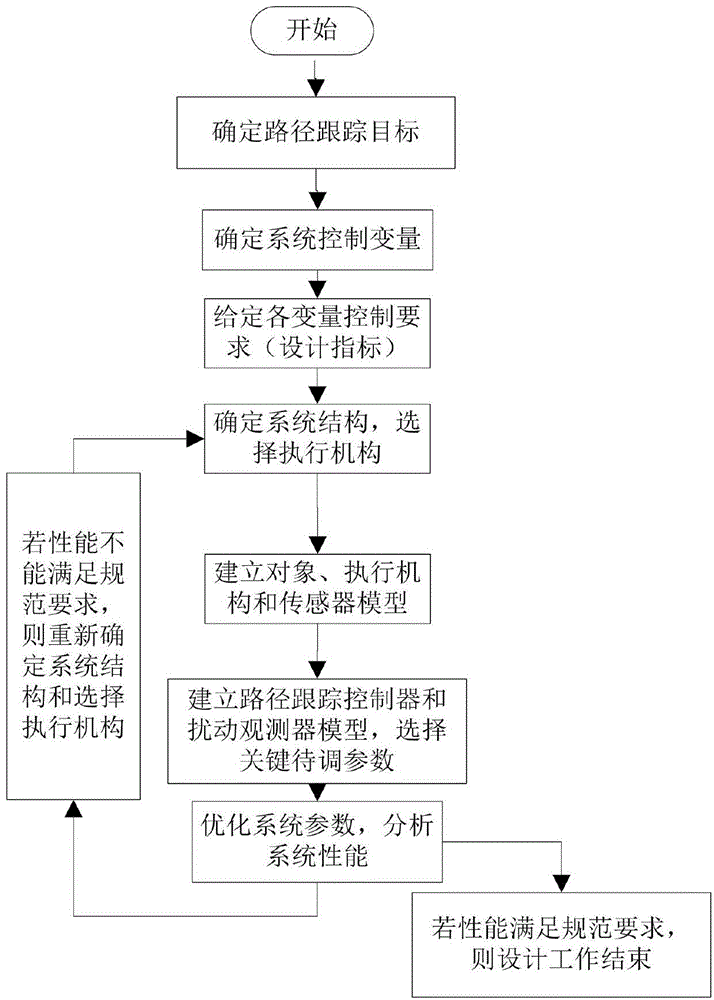
[0078] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
[0079] Since the model of the autonomous navigation control system for agricultural vehicles studied is nonlinear in nature, the control scheme of the third-order linear system is discussed first. Through the analysis and design of the third-order linear model, the optimization study of the nonlinear original model is carried out. The third-order system is divided into nonlinear model and linear model. The design idea is that the controller and observer designed under the linear model can also be used for the original nonlinear model.
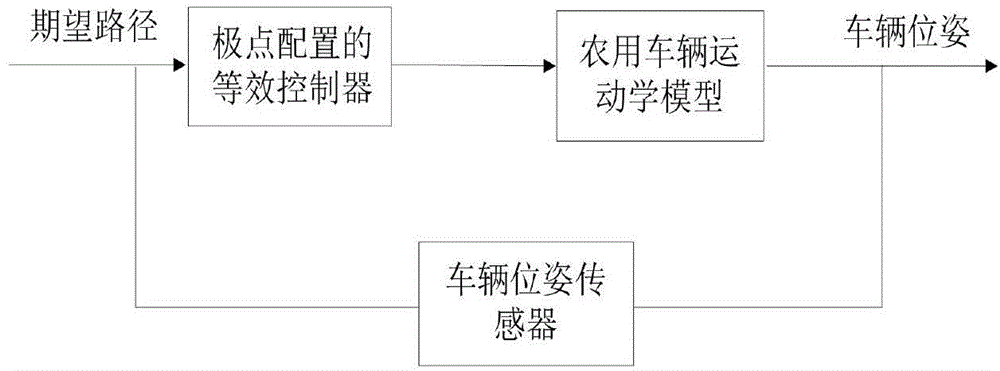
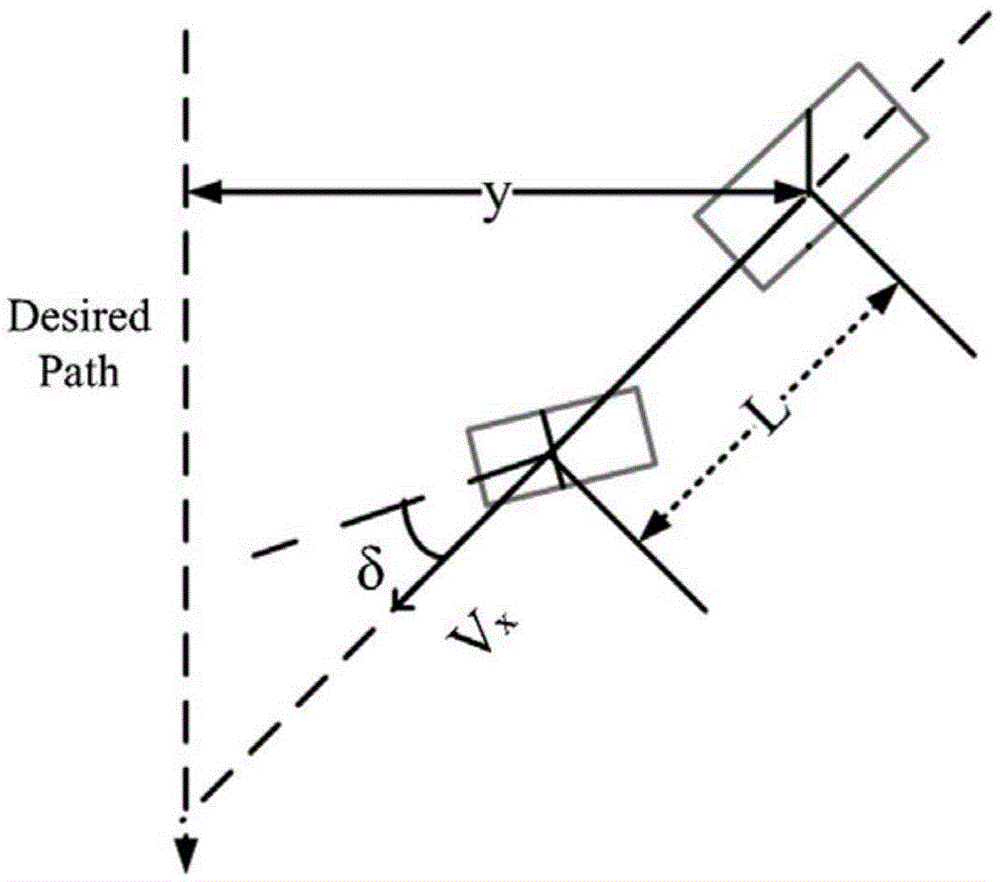
[0080] A third-order linear system model such as image 3 and Figure 4 As shown, according to the state space expression, the state feedback is used to configure the poles: the motion equation of the tractor is as follows
[0081] y ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More