

Boundary control method for restraining vibration of flexible mechanical arm
A flexible robot arm and boundary control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve limited and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
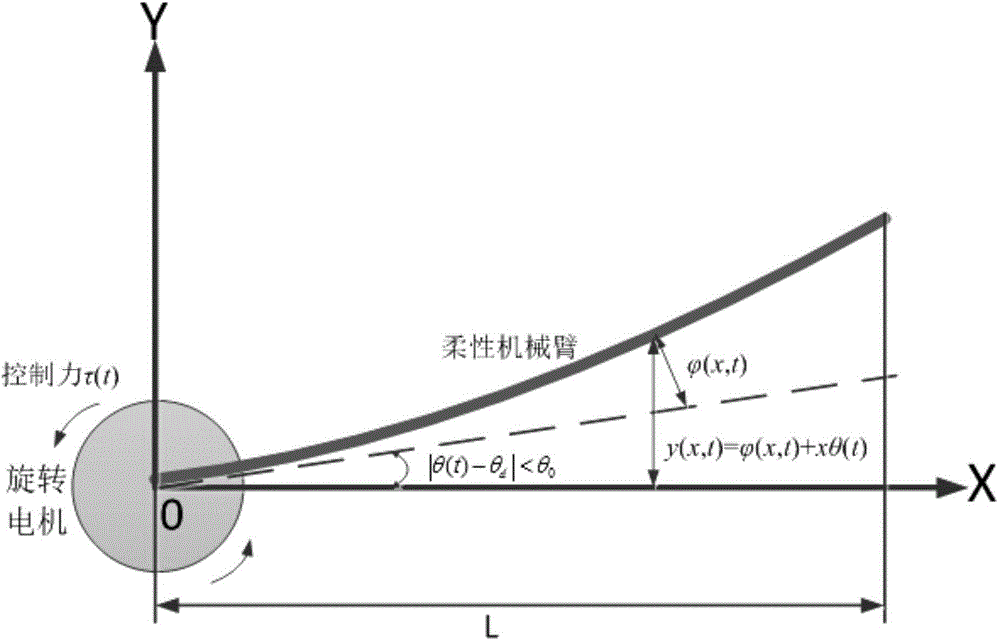
[0044] In order to explain the technical content of the present invention in a more orderly manner, the structure of the flexible manipulator and the working principle of the control system are firstly introduced. Such as figure 1 As shown, the structure of the flexible manipulator system is mainly composed of the manipulator and the rotating motor, and the boundary controller τ(t) is at figure 1 In , the control force τ(t) is used to simplify the expression, which is mainly composed of sensors, controllers and driving devices. The sensor includes a displacement sensor and an inclinometer, which are used to measure the real-time parameters of the robotic arm. In this embodiment, the displacement sensor measures the vibration amplitude of the flexible robotic arm The inclinometer measures the deflection angle θ(t) of the flexible robotic arm, and the boundary controller τ(t) calculates the control force based on the above parameters, so as to drive the motor to make correspond...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More