

A space intelligent flexible manipulator test device
A flexible robotic arm and test device technology, which is applied in the testing of mechanical components, measuring devices, and testing of machine/structural components, can solve problems such as difficult implementation and large investment, and achieve the effect of eliminating influence and realizing torsional vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiments of the present invention will be described in further detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
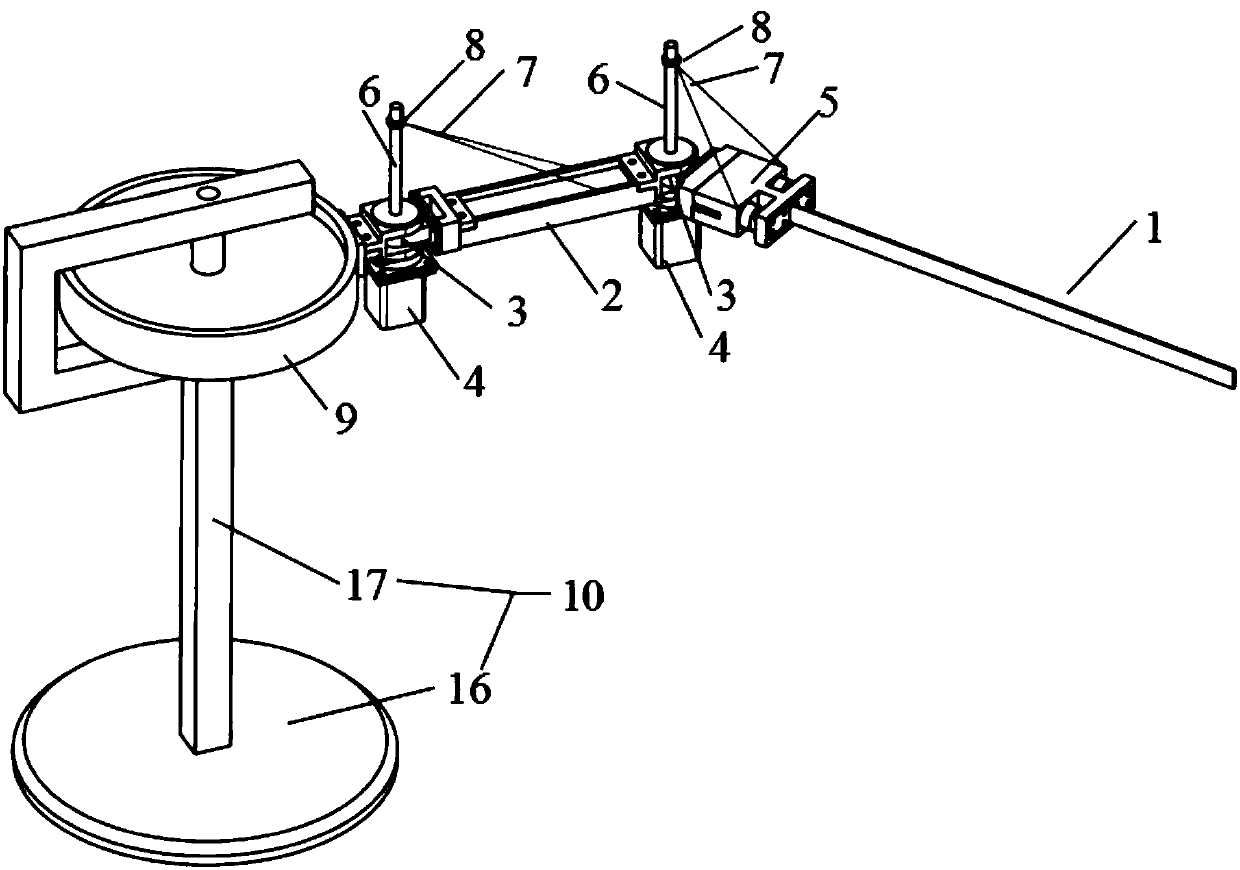
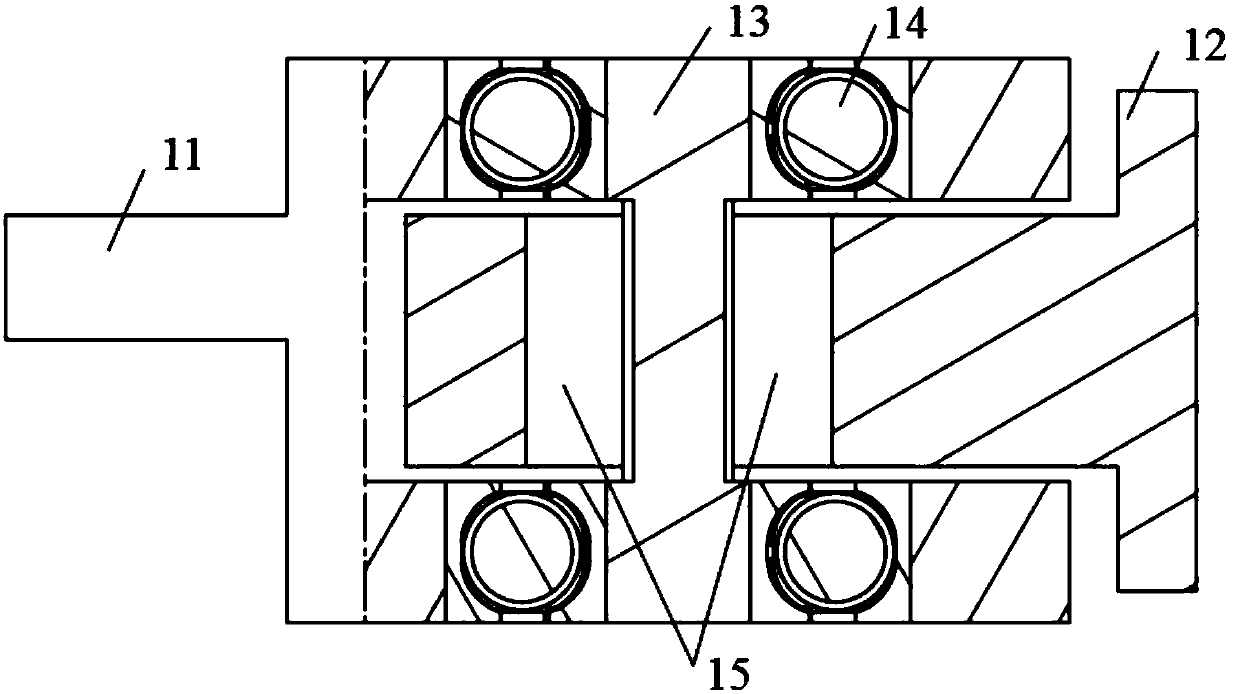
[0023] See Figure 1 to Figure 2 , A space intelligent flexible mechanical arm test device according to a preferred embodiment of the present invention includes a flexible arm 1, a rigid arm 2, a flexible joint 3, a vibration controller 5, a balance device, a foundation 9 and a support 10. Among them, the rigid arm and the flexible arm respectively form a mechanical arm assembly with a flexible joint. The flexible joint 3 includes a fixed part 11, a rotating part 12, a rotating shaft 13, a bearing 14 and a flexible spring sheet 15. The balance device includes a balance pillar 6, a balance Cable 7 and balance bearing 8.
[0024] The flexible arm 1 is connected to the flexible joint 3 through the vibration control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More