Crash sensor and intelligent dust collector robot
A technology of collision sensor and robot body, which is applied in the direction of vacuum cleaners, cleaning equipment, household appliances, etc., to achieve the effect of sensitive collision detection, simple structure, random installation position and fixing method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
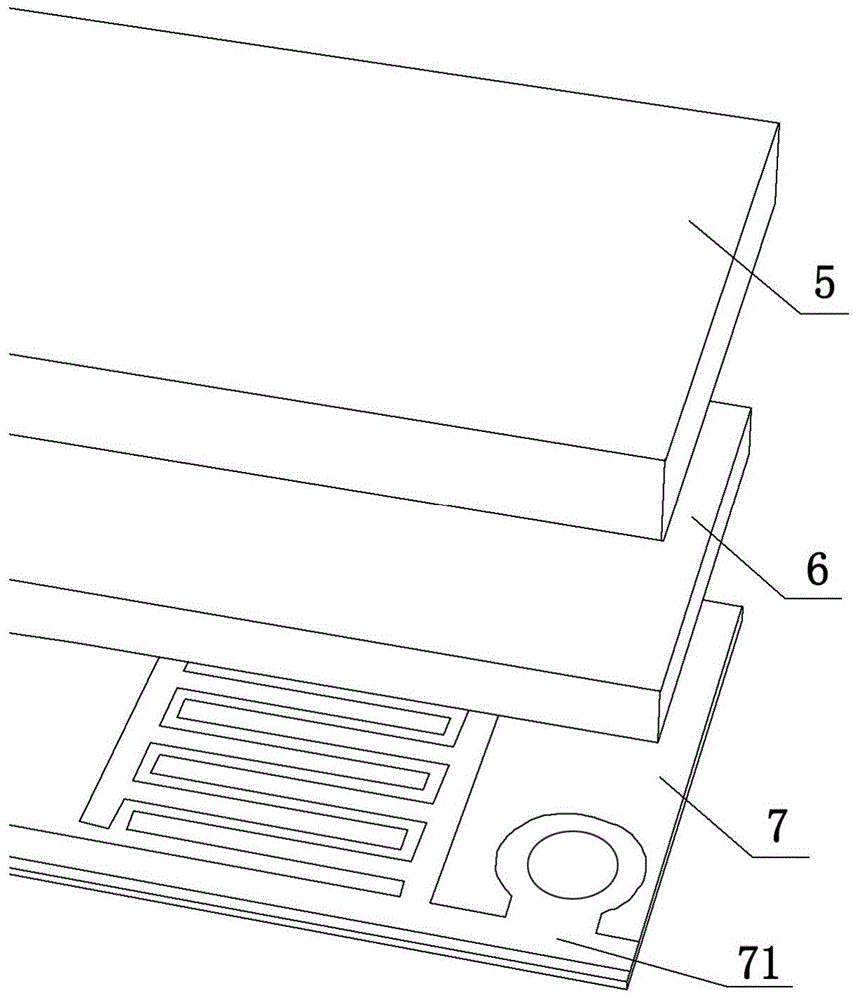
[0022] The basic structure of a collision sensor provided by the embodiment of the present invention consists of three parts, such as figure 2 As shown, from the outer layer to the inner layer are ordinary rubber 5 , conductive rubber 6 and flexible circuit board 7 . The flexible circuit board 7 is provided with two independent conductive loops 71 , one side of the conductive rubber 6 is fixed on the ordinary rubber 5 , and the other side of the conductive rubber 6 faces the flexible circuit board 7 .
[0023] Ordinary rubber 5 is used as a buffer part in contact with obstacles during a collision, and its shape is designed to be a smooth shape, such as image 3 As shown, the edges and corners of the outer surface have smooth chamfers, which are beautiful and will not damage other objects in the event of a collision. A groove is designed in the middle of the inner surface of the ordinary rubber 5 for fixing the conductive rubber 6 . The guide rubber 6 is used as a conductive...
Embodiment 2
[0027] The present invention can be applied to intelligent vacuum cleaner robots, replacing the traditional form of detecting collisions through micro switches.
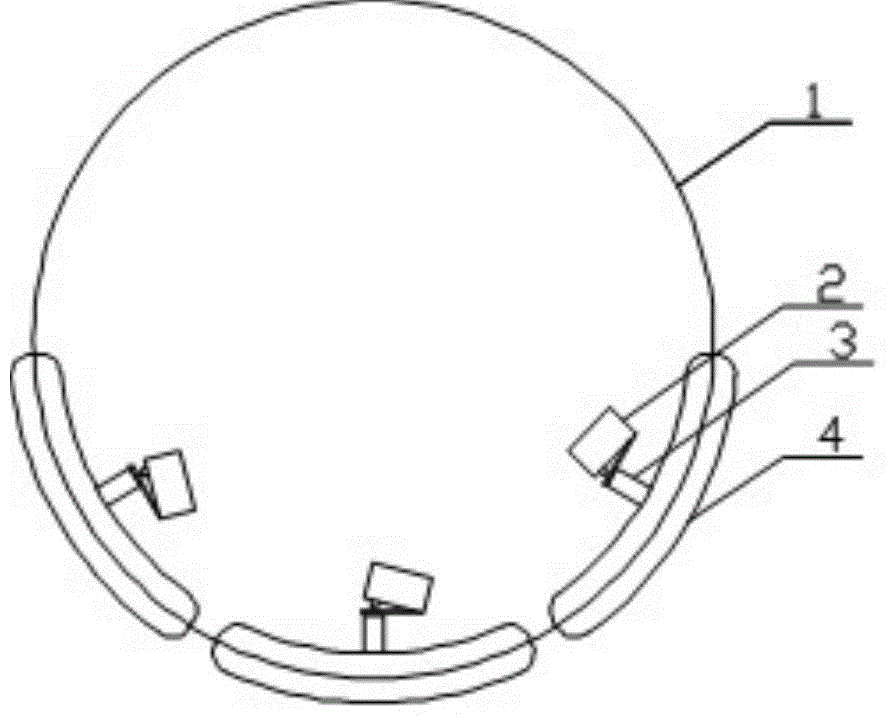
[0028] Such as Image 6 As shown, an intelligent vacuum cleaner robot provided by an embodiment of the present invention includes a robot body 91 and a plurality of collision sensors 92 . The robot body 91 is a cylinder, and the plurality of collision sensors 92 are installed around the side of the robot body.
[0029] In the embodiment of the present invention, six collision sensors 92 are installed around the robot body 91 , so that when the intelligent vacuum cleaner robot collides with an obstacle, it can make a corresponding response by distinguishing the location of the collision.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



